Note: A new GRASS GIS stable version has been released: GRASS GIS 7.6, available here.
Updated manual page: here
NAME
r3.in.lidar - Creates a 3D raster map from LAS LiDAR pointsKEYWORDS
3D raster, import, LIDARSYNOPSIS
Flags:
- -d
- Use base raster actual resolution instead of computational region
- -v
- Use only valid points
- Points invalid according to APSRS LAS specification will be filtered out
- --overwrite
- Allow output files to overwrite existing files
- --help
- Print usage summary
- --verbose
- Verbose module output
- --quiet
- Quiet module output
- --ui
- Force launching GUI dialog
Parameters:
- input=name [required]
- LAS input file
- LiDAR input file in LAS format (*.las or *.laz)
- n=name [required]
- Count of points per cell
- Name for output 3D raster map
- sum=name [required]
- Sum of values of point intensities per cell
- Name for output 3D raster map
- mean=name [required]
- Mean of point intensities per cell
- Name for output 3D raster map
- proportional_n=name [required]
- 3D raster map of proportional point count
- Point count per 3D cell divided by point count per vertical column
- proportional_sum=name [required]
- 3D raster map of proportional sum of values
- Sum of values per 3D cell divided by sum of values per vertical column
- return_filter=string
- Only import points of selected return type
- If not specified, all points are imported
- Options: first, last, mid
- class_filter=integer[,integer,...]
- Only import points of selected class(es)
- Input is comma separated integers. If not specified, all points are imported.
- base_raster=name
- Subtract raster values from the z coordinates
- The scale for z is applied beforehand, the filter afterwards
Table of contents
DESCRIPTION
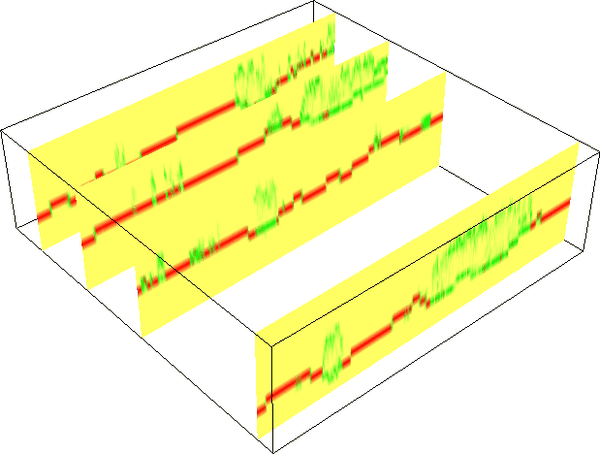
Figure: Proportional count of points per 3D cell. When 50% of all points in a vertical column fall into a given 3D cell, the value is 0.5. Here, the green color was assigned to 0.5, red to 1 and yellow to 0. The figure shows vertical slices and green color indicates high vegetation while red color indicates bare ground.
NOTES
- This module is highly experimental. Don't rely on its functionality or interface. Please report issues on the mailing list or in the bug tracker.
- No projection check or reprojection is performed, make sure you are using data in the right projection for your GRASS Location.
- Selection of points according to return or class is not yet supported.
- All outputs are currently mandatory.
- Some temporary maps are created but not cleaned up.
- Expects points to have intensity (random result for related outputs when they don't).
EXAMPLES
Set the region according to a 2D raster and adding 3D minimum (bottom), maximum (top) and vertical (top-bottom) resolution.g.region rast=secref b=80 t=160 tbres=5 -p3
r3.in.lidar input=points.las n=points_n sum=points_sum \
mean=points_mean proportional_n=points_n_prop \
proportional_sum=points_sum_prop
Point density vertical structure reduced to the terrain
Create ground raster:r.in.lidar input=points.las output=ground method=mean class_filter=2
g.region rast=secref b=0 t=47 -p3
r3.in.lidar input=points.las n=points_n sum=points_sum \
mean=points_mean proportional_n=points_n_prop \
proportional_sum=points_sum_prop \
base_raster=ground
SEE ALSO
r3.in.xyz, r.in.lidar, v.in.lidar, r.to.rast3, r3.mapcalc, g.regionREFERENCES
- V. Petras, A. Petrasova, J. Jeziorska, H. Mitasova (2016): Processing UAV and lidar point clouds in GRASS GIS. XXIII ISPRS Congress 2016 [ISPRS Archives, ResearchGate]
- ASPRS LAS format
- LAS library
- LAS library C API documentation
AUTHOR
Vaclav Petras, NCSU GeoForAll LabLast changed: $Date: 2016-08-22 19:07:22 -0700 (Mon, 22 Aug 2016) $
SOURCE CODE
Available at: r3.in.lidar source code (history)
Note: A new GRASS GIS stable version has been released: GRASS GIS 7.6, available here.
Updated manual page: here
Main index | 3D raster index | Topics index | Keywords index | Graphical index | Full index
© 2003-2019 GRASS Development Team, GRASS GIS 7.2.4svn Reference Manual