v.profile.points
Creates a profile (transect) from points
v.profile.points [-z] [line_input=name] [coordinates=east,north [,east,north,...]] [point_input=name] [file_input=name] output=name [width=float] [--overwrite] [--verbose] [--quiet] [--qq] [--ui]
Example:
v.profile.points line_input=name output=name
grass.tools.Tools.v_profile_points(line_input=None, coordinates=None, point_input=None, file_input=None, output, width=None, flags=None, overwrite=None, verbose=None, quiet=None, superquiet=None)
Example:
tools = Tools()
tools.v_profile_points(line_input="name", output="name")
This grass.tools API is experimental in version 8.5 and expected to be stable in version 8.6.
grass.script.run_command("v.profile.points", line_input=None, coordinates=None, point_input=None, file_input=None, output, width=None, flags=None, overwrite=None, verbose=None, quiet=None, superquiet=None)
Example:
gs.run_command("v.profile.points", line_input="name", output="name")
Parameters
line_input=name
Vector map with a single line (with 2 points)
Vector line prepared ahead
coordinates=east,north [,east,north,...]
Line coordinates (x,y,x,y)
Two pairs of coordinates as an alternative to a vector line
point_input=name
Vector map with points
Or data source for direct OGR access
file_input=name
LAS (or LAZ) file with a point cloud
File to be imported using v.in.lidar
output=name [required]
Name for output vector map
width=float
Width of profile in map units
Default with is 5% of the profile length
-z
Start the z coordinates at 0 instead of the actual height
--overwrite
Allow output files to overwrite existing files
--help
Print usage summary
--verbose
Verbose module output
--quiet
Quiet module output
--qq
Very quiet module output
--ui
Force launching GUI dialog
line_input : str, optional
Vector map with a single line (with 2 points)
Vector line prepared ahead
Used as: input, vector, name
coordinates : list[tuple[float, float]] | tuple[float, float] | list[float] | str, optional
Line coordinates (x,y,x,y)
Two pairs of coordinates as an alternative to a vector line
Used as: input, coords, east,north
point_input : str, optional
Vector map with points
Or data source for direct OGR access
Used as: input, vector, name
file_input : str, optional
LAS (or LAZ) file with a point cloud
File to be imported using v.in.lidar
Used as: input, file, name
output : str, required
Name for output vector map
Used as: output, vector, name
width : float, optional
Width of profile in map units
Default with is 5% of the profile length
flags : str, optional
Allowed values: z
z
Start the z coordinates at 0 instead of the actual height
overwrite : bool, optional
Allow output files to overwrite existing files
Default: None
verbose : bool, optional
Verbose module output
Default: None
quiet : bool, optional
Quiet module output
Default: None
superquiet : bool, optional
Very quiet module output
Default: None
Returns:
result : grass.tools.support.ToolResult | None
If the tool produces text as standard output, a ToolResult object will be returned. Otherwise, None will be returned.
Raises:
grass.tools.ToolError: When the tool ended with an error.
line_input : str, optional
Vector map with a single line (with 2 points)
Vector line prepared ahead
Used as: input, vector, name
coordinates : list[tuple[float, float]] | tuple[float, float] | list[float] | str, optional
Line coordinates (x,y,x,y)
Two pairs of coordinates as an alternative to a vector line
Used as: input, coords, east,north
point_input : str, optional
Vector map with points
Or data source for direct OGR access
Used as: input, vector, name
file_input : str, optional
LAS (or LAZ) file with a point cloud
File to be imported using v.in.lidar
Used as: input, file, name
output : str, required
Name for output vector map
Used as: output, vector, name
width : float, optional
Width of profile in map units
Default with is 5% of the profile length
flags : str, optional
Allowed values: z
z
Start the z coordinates at 0 instead of the actual height
overwrite : bool, optional
Allow output files to overwrite existing files
Default: None
verbose : bool, optional
Verbose module output
Default: None
quiet : bool, optional
Quiet module output
Default: None
superquiet : bool, optional
Very quiet module output
Default: None
DESCRIPTION
v.profile.points creates profile (transect) from vector point map or a lidar point cloud stored in a LAS file.
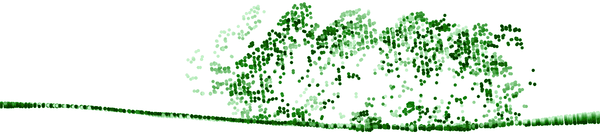
Figure: Profile (transect) of a lidar point cloud, closer points are
darker, further points are lighter
Workflow in GUI
First Map Display should contain some base layers such as point density raster or digital elevation model. First Map Display should contain the resulting profile or profiles. Optionally a grid overlay can be added. The "Zoom to selected map layers" button in the Map Display toolbar should be used to zoom to the newly created profile. The coordinates option in the Line tab can be activated, deactivated, or cleared during the work as need.
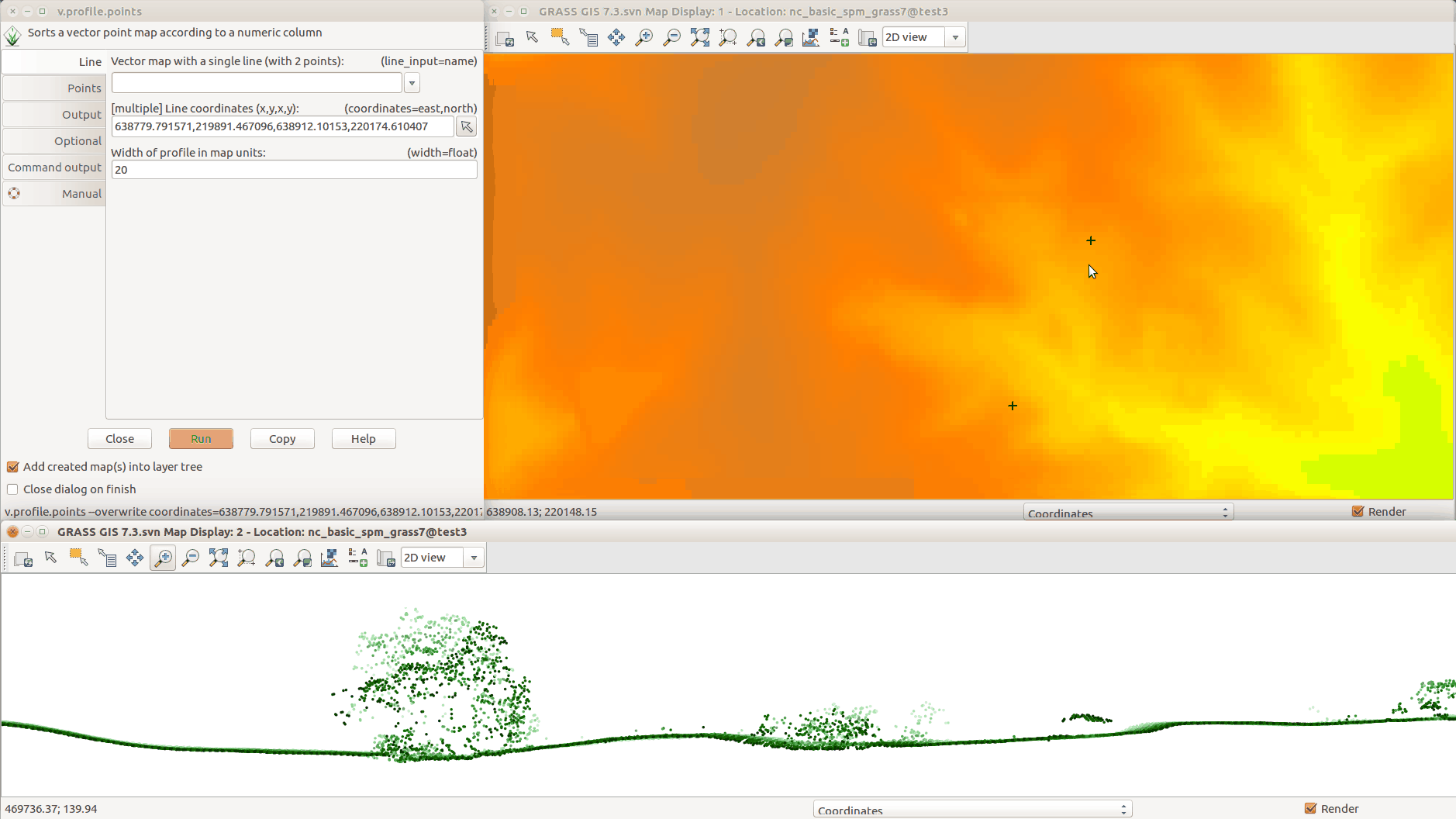
Figure: Creating the profile in GUI: running module from the top left
window; selecting line points in the Map Display in the top right;
resulting profile in the bottom.
NOTES
ASCII files such as CSV can be profiled after import and raster maps can be profiles after conversion to vector points. It is advantageous to limit the import or the conversion just to the area of interest to avoid unnecessary overhead.
EXAMPLE
v.profile.points input_file=.../points.las output=points_profile width=5 \
coord=2090904,731231,2091435,731252
AUTHOR
Vaclav Petras, NCSU GeoForAll Lab
SOURCE CODE
Available at: v.profile.points source code
(history)
Latest change: Tuesday Feb 17 14:54:26 2026 in commit 051b9c1