v.surf.rst
Performs surface interpolation from vector points map by splines.
Spatial approximation and topographic analysis from given point or isoline data in vector format to floating point raster format using regularized spline with tension.
v.surf.rst [-ctd] input=name [layer=string] [zcolumn=name] [where=sql_query] [elevation=name] [slope=name] [aspect=name] [pcurvature=name] [tcurvature=name] [mcurvature=name] [deviations=name] [cvdev=name] [treeseg=name] [overwin=name] [nprocs=integer] [mask=name] [tension=float] [smooth=float] [smooth_column=string] [segmax=integer] [npmin=integer] [dmin=float] [dmax=float] [zscale=float] [theta=float] [scalex=float] [--overwrite] [--verbose] [--quiet] [--qq] [--ui]
Example:
v.surf.rst input=name
grass.tools.Tools.v_surf_rst(input, layer="1", zcolumn=None, where=None, elevation=None, slope=None, aspect=None, pcurvature=None, tcurvature=None, mcurvature=None, deviations=None, cvdev=None, treeseg=None, overwin=None, nprocs=1, mask=None, tension=40., smooth=None, smooth_column=None, segmax=40, npmin=300, dmin=None, dmax=None, zscale=1.0, theta=None, scalex=None, flags=None, overwrite=None, verbose=None, quiet=None, superquiet=None)
Example:
tools = Tools()
tools.v_surf_rst(input="name")
This grass.tools API is experimental in version 8.5 and expected to be stable in version 8.6.
grass.script.run_command("v.surf.rst", input, layer="1", zcolumn=None, where=None, elevation=None, slope=None, aspect=None, pcurvature=None, tcurvature=None, mcurvature=None, deviations=None, cvdev=None, treeseg=None, overwin=None, nprocs=1, mask=None, tension=40., smooth=None, smooth_column=None, segmax=40, npmin=300, dmin=None, dmax=None, zscale=1.0, theta=None, scalex=None, flags=None, overwrite=None, verbose=None, quiet=None, superquiet=None)
Example:
gs.run_command("v.surf.rst", input="name")
Parameters
input=name [required]
Name of input vector map
Or data source for direct OGR access
layer=string
Layer number or name
Vector features can have category values in different layers. This number determines which layer to use. When used with direct OGR access this is the layer name.
Default: 1
zcolumn=name
Name of the attribute column with values to be used for approximation
If not given and input is 2D vector map then category values are used. If input is 3D vector map then z-coordinates are used.
where=sql_query
WHERE conditions of SQL statement without 'where' keyword
Example: income < 1000 and population >= 10000
elevation=name
Name for output surface elevation raster map
slope=name
Name for output slope raster map
aspect=name
Name for output aspect raster map
pcurvature=name
Name for output profile curvature raster map
tcurvature=name
Name for output tangential curvature raster map
mcurvature=name
Name for output mean curvature raster map
deviations=name
Name for output deviations vector point map
cvdev=name
Name for output cross-validation errors vector point map
treeseg=name
Name for output vector map showing quadtree segmentation
overwin=name
Name for output vector map showing overlapping windows
nprocs=integer
Number of threads for parallel computing
Default: 1
mask=name
Name of raster map used as mask
tension=float
Tension parameter
Default: 40.
smooth=float
Smoothing parameter
Smoothing is by default 0.1 unless smooth_column is specified
smooth_column=string
Name of the attribute column with smoothing parameters
segmax=integer
Maximum number of points in a segment
Default: 40
npmin=integer
Minimum number of points for approximation in a segment (>segmax)
Default: 300
dmin=float
Minimum distance between points (to remove almost identical points). Default value is half of the smaller resolution of the current region
dmax=float
Maximum distance between points on isoline (to insert additional points)
zscale=float
Conversion factor for values used for approximation
Default: 1.0
theta=float
Anisotropy angle (in degrees counterclockwise from East)
scalex=float
Anisotropy scaling factor
-c
Perform cross-validation procedure without raster approximation
-t
Use scale dependent tension
-d
Output partial derivatives instead of topographic parameters
--overwrite
Allow output files to overwrite existing files
--help
Print usage summary
--verbose
Verbose module output
--quiet
Quiet module output
--qq
Very quiet module output
--ui
Force launching GUI dialog
input : str, required
Name of input vector map
Or data source for direct OGR access
Used as: input, vector, name
layer : str, optional
Layer number or name
Vector features can have category values in different layers. This number determines which layer to use. When used with direct OGR access this is the layer name.
Used as: input, layer
Default: 1
zcolumn : str, optional
Name of the attribute column with values to be used for approximation
If not given and input is 2D vector map then category values are used. If input is 3D vector map then z-coordinates are used.
Used as: input, dbcolumn, name
where : str, optional
WHERE conditions of SQL statement without 'where' keyword
Example: income < 1000 and population >= 10000
Used as: input, sql_query, sql_query
elevation : str | type(np.ndarray) | type(np.array) | type(gs.array.array), optional
Name for output surface elevation raster map
Used as: output, raster, name
slope : str | type(np.ndarray) | type(np.array) | type(gs.array.array), optional
Name for output slope raster map
Used as: output, raster, name
aspect : str | type(np.ndarray) | type(np.array) | type(gs.array.array), optional
Name for output aspect raster map
Used as: output, raster, name
pcurvature : str | type(np.ndarray) | type(np.array) | type(gs.array.array), optional
Name for output profile curvature raster map
Used as: output, raster, name
tcurvature : str | type(np.ndarray) | type(np.array) | type(gs.array.array), optional
Name for output tangential curvature raster map
Used as: output, raster, name
mcurvature : str | type(np.ndarray) | type(np.array) | type(gs.array.array), optional
Name for output mean curvature raster map
Used as: output, raster, name
deviations : str, optional
Name for output deviations vector point map
Used as: output, vector, name
cvdev : str, optional
Name for output cross-validation errors vector point map
Used as: output, vector, name
treeseg : str, optional
Name for output vector map showing quadtree segmentation
Used as: output, vector, name
overwin : str, optional
Name for output vector map showing overlapping windows
Used as: output, vector, name
nprocs : int, optional
Number of threads for parallel computing
Default: 1
mask : str | np.ndarray, optional
Name of raster map used as mask
Used as: input, raster, name
tension : float, optional
Tension parameter
Default: 40.
smooth : float, optional
Smoothing parameter
Smoothing is by default 0.1 unless smooth_column is specified
smooth_column : str, optional
Name of the attribute column with smoothing parameters
segmax : int, optional
Maximum number of points in a segment
Default: 40
npmin : int, optional
Minimum number of points for approximation in a segment (>segmax)
Default: 300
dmin : float, optional
Minimum distance between points (to remove almost identical points). Default value is half of the smaller resolution of the current region
dmax : float, optional
Maximum distance between points on isoline (to insert additional points)
zscale : float, optional
Conversion factor for values used for approximation
Default: 1.0
theta : float, optional
Anisotropy angle (in degrees counterclockwise from East)
scalex : float, optional
Anisotropy scaling factor
flags : str, optional
Allowed values: c, t, d
c
Perform cross-validation procedure without raster approximation
t
Use scale dependent tension
d
Output partial derivatives instead of topographic parameters
overwrite : bool, optional
Allow output files to overwrite existing files
Default: None
verbose : bool, optional
Verbose module output
Default: None
quiet : bool, optional
Quiet module output
Default: None
superquiet : bool, optional
Very quiet module output
Default: None
Returns:
result : grass.tools.support.ToolResult | np.ndarray | tuple[np.ndarray] | None
If the tool produces text as standard output, a ToolResult object will be returned. Otherwise, None will be returned. If an array type (e.g., np.ndarray) is used for one of the raster outputs, the result will be an array and will have the shape corresponding to the computational region. If an array type is used for more than one raster output, the result will be a tuple of arrays.
Raises:
grass.tools.ToolError: When the tool ended with an error.
input : str, required
Name of input vector map
Or data source for direct OGR access
Used as: input, vector, name
layer : str, optional
Layer number or name
Vector features can have category values in different layers. This number determines which layer to use. When used with direct OGR access this is the layer name.
Used as: input, layer
Default: 1
zcolumn : str, optional
Name of the attribute column with values to be used for approximation
If not given and input is 2D vector map then category values are used. If input is 3D vector map then z-coordinates are used.
Used as: input, dbcolumn, name
where : str, optional
WHERE conditions of SQL statement without 'where' keyword
Example: income < 1000 and population >= 10000
Used as: input, sql_query, sql_query
elevation : str, optional
Name for output surface elevation raster map
Used as: output, raster, name
slope : str, optional
Name for output slope raster map
Used as: output, raster, name
aspect : str, optional
Name for output aspect raster map
Used as: output, raster, name
pcurvature : str, optional
Name for output profile curvature raster map
Used as: output, raster, name
tcurvature : str, optional
Name for output tangential curvature raster map
Used as: output, raster, name
mcurvature : str, optional
Name for output mean curvature raster map
Used as: output, raster, name
deviations : str, optional
Name for output deviations vector point map
Used as: output, vector, name
cvdev : str, optional
Name for output cross-validation errors vector point map
Used as: output, vector, name
treeseg : str, optional
Name for output vector map showing quadtree segmentation
Used as: output, vector, name
overwin : str, optional
Name for output vector map showing overlapping windows
Used as: output, vector, name
nprocs : int, optional
Number of threads for parallel computing
Default: 1
mask : str, optional
Name of raster map used as mask
Used as: input, raster, name
tension : float, optional
Tension parameter
Default: 40.
smooth : float, optional
Smoothing parameter
Smoothing is by default 0.1 unless smooth_column is specified
smooth_column : str, optional
Name of the attribute column with smoothing parameters
segmax : int, optional
Maximum number of points in a segment
Default: 40
npmin : int, optional
Minimum number of points for approximation in a segment (>segmax)
Default: 300
dmin : float, optional
Minimum distance between points (to remove almost identical points). Default value is half of the smaller resolution of the current region
dmax : float, optional
Maximum distance between points on isoline (to insert additional points)
zscale : float, optional
Conversion factor for values used for approximation
Default: 1.0
theta : float, optional
Anisotropy angle (in degrees counterclockwise from East)
scalex : float, optional
Anisotropy scaling factor
flags : str, optional
Allowed values: c, t, d
c
Perform cross-validation procedure without raster approximation
t
Use scale dependent tension
d
Output partial derivatives instead of topographic parameters
overwrite : bool, optional
Allow output files to overwrite existing files
Default: None
verbose : bool, optional
Verbose module output
Default: None
quiet : bool, optional
Quiet module output
Default: None
superquiet : bool, optional
Very quiet module output
Default: None
DESCRIPTION
v.surf.rst program performs spatial approximation based on z-values (input vector map is 3D and zcolumn parameter is not given), categories (input vector map is 2D and zcolumn parameter is not given), or attributes (zcolumn parameter is given) of point or isoline data given in a vector map named input to grid cells in the output raster map elevation representing a surface.
As an option, simultaneously with approximation, topographic parameters slope, aspect, profile curvature (measured in the direction of the steepest slope), tangential curvature (measured in the direction of a tangent to contour line) or mean curvature are computed and saved as raster maps specified by the options slope, aspect, pcurv, tcurv, mcurv respectively. If -d flag is set, v.surf.rst outputs partial derivatives f_x, f_y, f_xx, f_yy, f_xy instead of slope, aspect, profile, tangential and mean curvatures respectively. If the input vector map have time stamp, the program creates time stamp for all output maps.
User can either use r.mask to set a mask or specify a raster map in mask option, which will be used as a mask. The approximation is skipped for cells which have zero or NULL value in mask. NULL values will be assigned to these cells in all output raster maps. Data points are checked for identical points and points that are closer to each other than the given dmin are removed. If sparsely digitized contours or isolines are used as input, additional points are computed between each 2 points on a line if the distance between them is greater than specified dmax. Parameter zmult allows user to rescale the values used for approximation (useful e.g. for transformation of elevations given in feet to meters, so that the proper values of slopes and curvatures can be computed).
Regularized spline with tension is used for the approximation. The tension parameter tunes the character of the resulting surface from thin plate to membrane. Smoothing parameter smooth controls the deviation between the given points and the resulting surface and it can be very effective in smoothing noisy data while preserving the geometrical properties of the surface. With the smoothing parameter set to zero (smooth=0) the resulting surface passes exactly through the data points (spatial interpolation is performed). When smoothing parameter is used, it is also possible to output a vector point map deviations containing deviations of the resulting surface from the given data.
If the number of given points is greater than segmax, segmented processing is used. The region is split into quadtree-based rectangular segments, each having less than segmax points and approximation is performed on each segment of the region. To ensure smooth connection of segments the approximation function for each segment is computed using the points in the given segment and the points in its neighborhood which are in the rectangular window surrounding the given segment. The number of points taken for approximation is controlled by npmin, the value of which must be larger than segmax. User can choose to output vector maps treeseg and overwin which represent the quad tree used for segmentation and overlapping neighborhoods from which additional points for approximation on each segment were taken.
Predictive error of surface approximation for given parameters can be computed using the -c flag. A crossvalidation procedure is then performed using the data given in the vector map input and the estimated predictive errors are stored in the vector point map cvdev. When using this flag, no raster output maps are computed. Anisotropic surfaces can be interpolated by setting anisotropy angle theta and scaling factor scalex. The program writes values of selected input and internally computed parameters to the history file of raster map elevation.
The user must run g.region before the program to set the region and resolution for approximation.
NOTES
v.surf.rst uses regularized spline with tension for approximation from vector data. The module does not require input data with topology, therefore both level1 (no topology) and level2 (with topology) vector point data are supported. Additional points are used for approximation between each 2 points on a line if the distance between them is greater than specified dmax. If dmax is small (less than cell size) the number of added data points can be vary large and slow down approximation significantly. The implementation has a segmentation procedure based on quadtrees which enhances the efficiency for large data sets. Special color tables are created by the program for output raster maps.
Topographic parameters are computed directly from the approximation function so that the important relationships between these parameters are preserved. The equations for computation of these parameters and their interpretation is described in Mitasova and Hofierka, 1993 or Neteler and Mitasova, 2004. Slopes and aspect are computed in degrees (0-90 and 1-360 respectively). The aspect raster map has value 0 assigned to flat areas (with slope less than 0.1%) and to singular points with undefined aspect. Aspect points downslope and is 90 to the North, 180 to the West, 270 to the South and 360 to the East, the values increase counterclockwise. Curvatures are positive for convex and negative for concave areas. Singular points with undefined curvatures have assigned zero values.
Tension and smoothing allow user to tune the surface character. For most landscape scale applications the default values should provide adequate results. The program gives warning when significant overshoots appear in the resulting surface and higher tension or smoothing should be used.
To select parameters that will produce a surface with desired properties, it is useful to know that the method is scale dependent and the tension works as a rescaling parameter (high tension "increases the distances between the points" and reduces the range of impact of each point, low tension "decreases the distance" and the points influence each other over longer range). Surface with tension set too high behaves like a membrane (rubber sheet stretched over the data points) with peak or pit ("crater") in each given point and everywhere else the surface goes rapidly to trend. If digitized contours are used as input data, high tension can cause artificial waves along contours. Lower tension and higher smoothing is suggested for such a case.
Surface with tension set too low behaves like a stiff steel plate and overshoots can appear in areas with rapid change of gradient and segmentation can be visible. Increase in tension should solve the problems.
There are two options how tension can be applied in relation to dnorm (dnorm rescales the coordinates depending on the average data density so that the size of segments with segmax=40 points is around 1 - this ensures the numerical stability of the computation):
- Default: the given tension is applied to normalized data (x/dnorm), that means that the distances are multiplied (rescaled) by tension/dnorm. If density of points is changed, e.g., by using higher dmin, the dnorm changes and tension needs to be changed too to get the same result. Because the tension is applied to normalized data its suitable value is usually within the 10-100 range and does not depend on the actual scale (distances) of the original data (which can be km for regional applications or cm for field experiments).
- Flag-t: The given tension is applied to un-normalized data (rescaled tension = tension*dnorm/1000 is applied to normalized data (x/dnorm) and therefore dnorm cancels out) so here tension truly works as a rescaling parameter. For regional applications with distances between points in km the suitable tension can be 500 or higher, for detailed field scale analysis it can be 0.1. To help select how much the data need to be rescaled the program writes dnorm and rescaled tension fi=tension*dnorm/1000 at the beginning of the program run. This rescaled tension should be around 20-30. If it is lower or higher, the given tension parameter should be changed accordingly.
The default is a recommended choice, however for the applications where the user needs to change density of data and preserve the approximation character the -t flag can be helpful.
Anisotropic data (e.g. geologic phenomena) can be interpolated using theta and scalex defining orientation and ratio of the perpendicular axes put on the longest/shortest side of the feature, respectively. Theta is measured in degrees from East, counterclockwise. Scalex is a ratio of axes sizes. Setting scalex in the range 0-1, results in a pattern prolonged in the direction defined by theta. Scalex value 0.5 means that modeled feature is approximately 2 times longer in the direction of theta than in the perpendicular direction. Scalex value 2 means that axes ratio is reverse resulting in a pattern perpendicular to the previous example. Please note that anisotropy option has not been extensively tested and may include bugs (for example, topographic parameters may not be computed correctly) - if there are problems, please report to GRASS bugtracker (accessible from https://grass.osgeo.org/).
For data with values changing over several magnitudes (sometimes the concentration or density data) it is suggested to interpolate the log of the values rather than the original ones.
v.surf.rst checks the numerical stability of the algorithm by computing the values in given points, and prints the root mean square deviation (rms) found into the history file of raster map elevation. For computation with smoothing set to 0, rms should be 0. Significant increase in tension is suggested if the rms is unexpectedly high for this case. With smoothing parameter greater than zero the surface will not pass exactly through the data points and the higher the parameter the closer the surface will be to the trend. The rms then represents a measure of smoothing effect on data. More detailed analysis of smoothing effects can be performed using the output deviations option.
v.surf.rst also writes the values of parameters used in computation into the comment part of history file elevation as well as the following values which help to evaluate the results and choose the suitable parameters: minimum and maximum z values in the data file (zmin_data, zmax_data) and in the interpolated raster map (zmin_int, zmax_int), rescaling parameter used for normalization (dnorm), which influences the tension.
If visible connection of segments appears, the program should be rerun with higher npmin to get more points from the neighborhood of given segment and/or with higher tension.
When the number of points in a vector map is not too large (less than 800), the user can skip segmentation by setting segmax to the number of data points or segmax=700.
v.surf.rst gives warning when user wants to interpolate outside the rectangle given by minimum and maximum coordinates in the vector map, zoom into the area where the given data are is suggested in this case.
When a mask is used, the program takes all points in the given region for approximation, including those in the area which is masked out, to ensure proper approximation along the border of the mask. It therefore does not mask out the data points, if this is desirable, it must be done outside v.surf.rst.
Cross validation procedure
The "optimal" approximation parameters for given data can be found using a cross-validation (CV) procedure (-c flag). The CV procedure is based on removing one input data point at a time, performing the approximation for the location of the removed point using the remaining data points and calculating the difference between the actual and approximated value for the removed data point. The procedure is repeated until every data point has been, in turn, removed. This form of CV is also known as the "leave-one-out" or "jack-knife" method (Hofierka et al., 2002; Hofierka, 2005). The differences (residuals) are then stored in the cvdev output vector map. Please note that during the CV procedure no other output maps can be set, the approximation is performed only for locations defined by input data. To find "optimal parameters", the CV procedure must be iteratively performed for all reasonable combinations of the approximation parameters with small incremental steps (e.g. tension, smoothing) in order to find a combination with minimal statistical error (also called predictive error) defined by root mean squared error (RMSE), mean absolute error (MAE) or other error characteristics. A script with loops for tested RST parameters can do the job, necessary statistics can be calculated using e.g. v.univar. It should be noted that crossvalidation is a time-consuming procedure, usually reasonable for up to several thousands of points. For larger data sets, CV should be applied to a representative subset of the data. The cross-validation procedure works well only for well-sampled phenomena and when minimizing the predictive error is the goal. The parameters found by minimizing the predictive (CV) error may not not be the best for for poorly sampled phenomena (result could be strongly smoothed with lost details and fluctuations) or when significant noise is present that needs to be smoothed out. The addon v.surf.rst.cv provides an ease of use wrapper for the cross-validation procedure.
Performance
To enable parallel processing, the user can specify the number of threads to be used with the nprocs parameter (default 1). Figures 1 and 2 show benchmark results running on Intel® Core™ i5-10210U CPU @ 1.60GHz × 8. See benchmark scripts in the source code for more details.
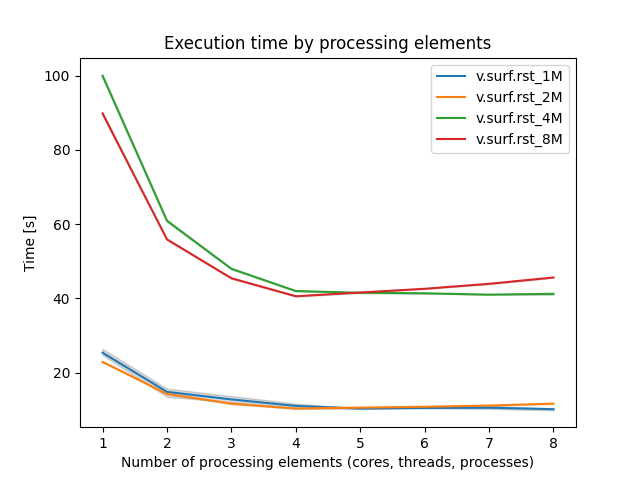
Figure 1: Benchmark shows execution time for different number of cells
(1M, 2M, 4M, and 8M).
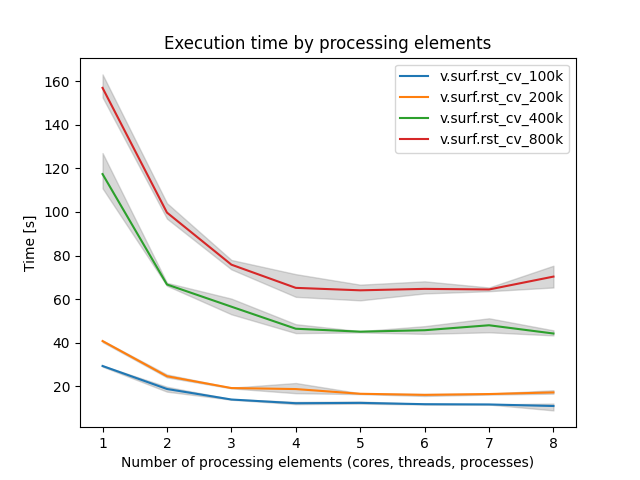
Figure 2: Benchmark shows execution time for running cross-validation
on different number of cells (100k, 200k, 400k, and 800k).
EXAMPLE
Setting for lidar point cloud
Lidar point clouds as well as UAS SfM-based (phodar) point clouds tend to be dense in relation to the desired raster resolution and thus a different set of parameters is more advantageous, e.g. in comparison to a typical temperature data interpolation.
v.surf.rst input=points elevation=elevation npmin=100
Usage of the where parameter
Using the where parameter, the interpolation can be limited to use only a subset of the input vectors.
North Carolina example (we simulate randomly distributed elevation measures which we interpolate to a gap-free elevation surface):
g.region raster=elevation -p
# random elevation extraction of 500 samplings
r.random -s elevation vector=elevrand n=500
v.info -c elevrand
v.db.select elevrand
# interpolation based on all points
v.surf.rst elevrand zcol=value elevation=elev_full
# apply the color table of the original raster map
r.colors elev_full raster=elevation
d.rast elev_full
d.vect elevrand
# compute univariate statistics with 1st/3rd quartiles
v.db.univar -e elevrand column=value
# interpolation based on subset of points (only those over 1st quartile)
v.surf.rst input=elevrand zcolumn=value elevation=elev_partial npmin=100 where="value > 94.9"
r.colors map=elev_partial raster=elevation
d.rast elev_partial
d.vect elevrand where="value > 94.9"
REFERENCES
- Mitasova, H., Mitas, L. and Harmon, R.S., 2005, Simultaneous spline approximation and topographic analysis for lidar elevation data in open source GIS, IEEE GRSL 2 (4), 375- 379.
- Hofierka, J., 2005, Interpolation of Radioactivity Data Using Regularized Spline with Tension. Applied GIS, Vol. 1, No. 2, pp. 16-01 to 16-13. DOI: 10.2104/ag050016
- Hofierka J., Parajka J., Mitasova H., Mitas L., 2002, Multivariate Interpolation of Precipitation Using Regularized Spline with Tension. Transactions in GIS 6(2), pp. 135-150.
- H. Mitasova, L. Mitas, B.M. Brown, D.P. Gerdes, I. Kosinovsky, 1995, Modeling spatially and temporally distributed phenomena: New methods and tools for GRASS GIS. International Journal of GIS, 9 (4), special issue on Integrating GIS and Environmental modeling, 433-446.
- Mitasova, H. and Mitas, L., 1993: Interpolation by Regularized Spline with Tension: I. Theory and Implementation, Mathematical Geology ,25, 641-655.
- Mitasova, H. and Hofierka, J., 1993: Interpolation by Regularized Spline with Tension: II. Application to Terrain Modeling and Surface Geometry Analysis, Mathematical Geology 25, 657-667.
- Mitas, L., and Mitasova H., 1988, General variational approach to the approximation problem, Computers and Mathematics with Applications, v.16, p. 983-992.
- Neteler, M. and Mitasova, H., 2008, Open Source GIS: A GRASS GIS Approach, 3rd Edition, Springer, New York, 406 pages.
- Talmi, A. and Gilat, G., 1977 : Method for Smooth Approximation of Data, Journal of Computational Physics, 23, p.93-123.
- Wahba, G., 1990, : Spline Models for Observational Data, CNMS-NSF Regional Conference series in applied mathematics, 59, SIAM, Philadelphia, Pennsylvania.
SEE ALSO
v.vol.rst, v.surf.idw, v.surf.bspline, r.fillnulls, g.region
Overview: Interpolation and Resampling in GRASS
For examples of applications see GRASS4 implementation and GRASS5 and GRASS6 implementation.
AUTHORS
Original version of program (in FORTRAN) and GRASS enhancements:
Lubos Mitas, NCSA, University of Illinois at Urbana Champaign, Illinois,
USA (1990-2000); Department of Physics, North Carolina State University,
Raleigh
Helena Mitasova, USA CERL, Department of Geography, University of
Illinois at Urbana-Champaign, USA (1990-2001); MEAS, North Carolina
State University, Raleigh
Modified program (translated to C, adapted for GRASS, new segmentation
procedure):
Irina Kosinovsky, US Army CERL, Dave Gerdes, US Army CERL
Modifications for new sites format and timestamping:
Darrel McCauley, Purdue University, Bill Brown, US Army CERL
Update for GRASS5.7, GRASS6 and addition of crossvalidation:
Jaroslav Hofierka, University of Presov; Radim Blazek, ITC-irst
Parallelization using OpenMP:
Stanislav Zubal, Czech Technical University in Prague
Michal Lacko, Pavol Jozef Safarik University in Kosice
Parallelization of cross-validation using OpenMP:
Chung-Yuan Liang, Purdue University, West Lafayette, Indiana, USA
SOURCE CODE
Available at: v.surf.rst source code
(history)
Latest change: Friday Aug 08 09:39:19 2025 in commit ed72c71