Note: A new GRASS GIS stable version has been released: GRASS GIS 7.8, available here.
Updated manual page: here
NAME
r.path - Traces paths from starting points following input directions.KEYWORDS
raster, hydrology, cost surfaceSYNOPSIS
Flags:
- -c
- Copy input cell values on output
- -a
- Accumulate input values along the path
- -n
- Count cell numbers along the path
- --overwrite
- Allow output files to overwrite existing files
- --help
- Print usage summary
- --verbose
- Verbose module output
- --quiet
- Quiet module output
- --ui
- Force launching GUI dialog
Parameters:
- input=name [required]
- Name of input direction
- Direction in degrees CCW from east, or bitmask encoded
- format=string [required]
- Format of the input direction map
- Options: auto, degree, 45degree, bitmask
- Default: auto
- auto: auto-detect direction format
- degree: degrees CCW from East
- 45degree: degrees CCW from East divided by 45 (e.g. r.watershed directions)
- bitmask: bitmask encoded directions (e.g. r.cost -b)
- values=name
- Name of input raster values to be used for output
- Name of input raster map
- raster_path=name
- Name for output raster path map
- Name for output raster map
- vector_path=name
- Name for output vector path map
- Name for output vector map
- start_coordinates=east,north[,east,north,...]
- Coordinates of starting point(s) (E,N)
- start_points=name[,name,...]
- Name of starting vector points map(s)
- Or data source(s) for direct OGR access
Table of contents
DESCRIPTION
r.path traces a path from starting points following input directions. Such a movement direction map can be generated with r.walk, r.cost, r.slope.aspect, r.watershed, or r.fill.dir, provided that the direction is in degrees, measured counterclockwise from east.Alternatively, bitmask-encoded directions can be provided where each bit position corresponds to a specific neighbour. A path will continue to all neighbours with their bit set. This means a path can split and merge. Such bitmasked directions can be created with the -b flag of r.cost and r.walk.
Direction encoding for neighbors of x
135 90 45 7 8 1
180 x 360 6 x 2
225 270 315 5 4 3
degrees bit positions
CCW from East
The output raster map will show one or more least-cost paths between each user-provided location(s) and the target points (direction ≤ 0). By default, the output will be an integer CELL map with the id of the start points along the least cost path, and null cells elsewhere.
With the -c (copy) flag, the values raster map cell values are copied verbatim along the path. With the -a (accumulate) flag, the accumulated cell value from the starting point up to the current cell is written on output. With either the -c or the -a flags, the raster_path map is created with the same cell type as the values raster map (integer, float or double). With the -n (number) flag, the cells are numbered consecutively from the starting point to the final point. The -c, -a, and -n flags are mutually incompatible.
The start_coordinates parameter consists of map E and N grid coordinates of a starting point. Each x,y pair is the easting and northing (respectively) of a starting point from which a path will be traced following input directions. The start_points parameter can take multiple vector maps containing additional starting points.
NOTES
The directions are recorded as degrees CCW from East, the Knight's move of r.cost and r.walk is considered:
112.5 67.5
157.5 135 90 45 22.5
180 x 0
202.5 225 270 315 337.5
247.5 292.5
EXAMPLES
Hydrological path
We are using the full North Carolina sample dataset. First we create the two points from a text file using v.in.ascii module (here the text file is CSV and we are using unix here-file syntax with EOF, in GUI just enter the values directly for the parameter input):v.in.ascii input=- output=start format=point separator=comma <<EOF 638667.15686275,220610.29411765 638610.78431373,220223.03921569 EOF
r.watershed elevation=elev_lid792_1m accumulation=accum drainage=drain_dir
r.mapcalc "drain_deg = if(drain_dir != 0, 45. * abs(drain_dir), null())"
r.path input=drain_deg raster_path=drain_path vector_path=drain_path start_points=start
r.colors map=elev_lid792_1m color=elevation r.relief input=elev_lid792_1m output=relief
d.shade shade=relief color=elev_lid792_1m d.vect map=drain_path color=0:0:61 width=4 legend_label="drainage paths" d.vect map=start color=none fill_color=224:0:0 icon=basic/circle size=15 legend_label=origins d.legend.vect -b
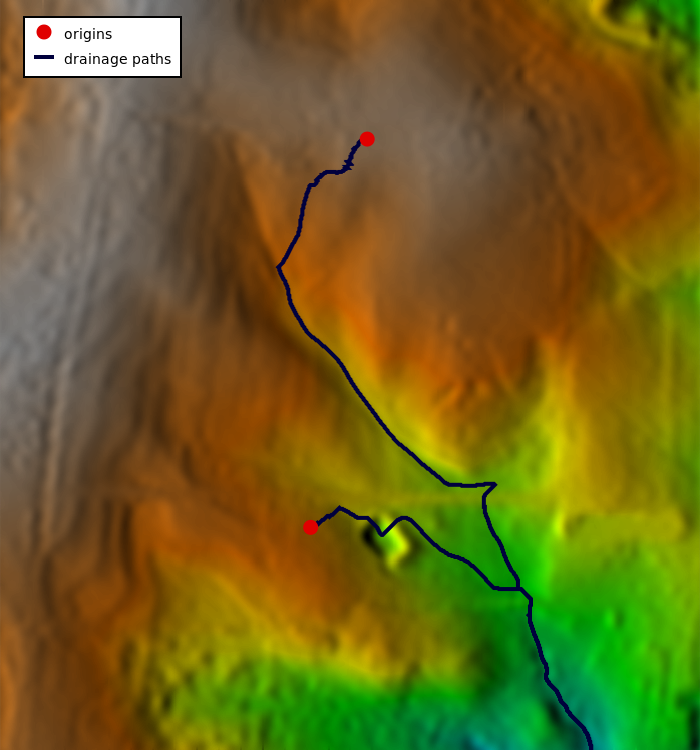
Figure: Drainage paths from two points where directions from r.watershed were used
Least-cost path
We compute bitmask encoded movement directions using r.walk:
g.region swwake_30m -p
# create friction map based on land cover
r.recode input=landclass96 output=friction rules=- << EOF
1:3:0.1:0.1
4:5:10.:10.
6:6:1000.0:1000.0
7:7:0.3:0.3
EOF
# without Knight's move
r.walk -b elevation=elev_ned_30m friction=friction output=walkcost \
outdir=walkdir start_coordinates=635576,216485
r.path input=walkdir start_coordinates=640206,222795 \
raster_path=walkpath vector_path=walkpath
# with Knight's move
r.walk -b -k elevation=elev_ned_30m friction=friction output=walkcost_k \
outdir=walkdir_k start_coordinates=635576,216485
r.path input=walkdir_k start_coordinates=640206,222795 \
raster_path=walkpath_k vector_path=walkpath_k
# without Knight's move and without bitmask encoding (single direction)
r.walk elevation=elev_ned_30m friction=friction output=walkcost_s \
outdir=walkdir_s start_coordinates=635576,216485
r.path input=walkdir_s start_coordinates=640206,222795 \
raster_path=walkpath_s vector_path=walkpath_s
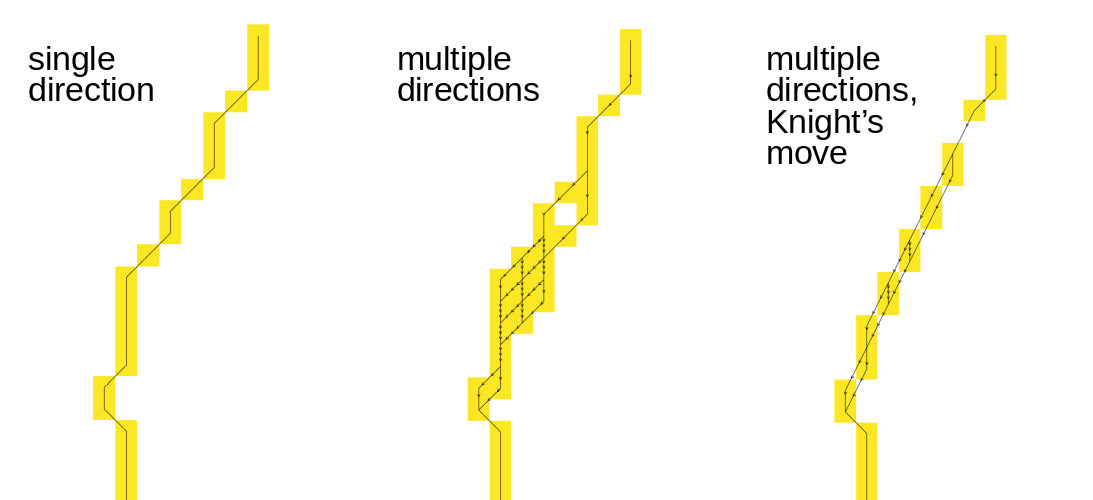
Figure: Comparison of shortest paths using single directions and multiple bitmask encoded directions without and with Knight's move
SEE ALSO
g.region, r.basins.fill, r.cost, r.fill.dir, r.mapcalc, r.recode, r.terraflow, r.walk, r.watershedAUTHORS
Markus MetzLast changed: $Date$
SOURCE CODE
Available at: r.path source code (history)
Note: A new GRASS GIS stable version has been released: GRASS GIS 7.8, available here.
Updated manual page: here
Main index | Raster index | Topics index | Keywords index | Graphical index | Full index
© 2003-2020 GRASS Development Team, GRASS GIS 7.6.2dev Reference Manual