Note: This document is for an older version of GRASS GIS that has been discontinued. You should upgrade, and read the current manual page.
NAME
r.slope.aspect - Generates raster maps of slope, aspect, curvatures and partial derivatives from an elevation raster map.Aspect is calculated counterclockwise from east.
KEYWORDS
raster, terrain, aspect, slope, curvatureSYNOPSIS
Flags:
- -a
- Do not align the current region to the raster elevation map
- -e
- Compute output at edges and near NULL values
- -n
- Create aspect as degrees clockwise from North (azimuth), with flat = -9999
- Default: degrees counter-clockwise from East, with flat = 0
- --overwrite
- Allow output files to overwrite existing files
- --help
- Print usage summary
- --verbose
- Verbose module output
- --quiet
- Quiet module output
- --ui
- Force launching GUI dialog
Parameters:
- elevation=name [required]
- Name of input elevation raster map
- slope=name
- Name for output slope raster map
- aspect=name
- Name for output aspect raster map
- format=string
- Format for reporting the slope
- Options: degrees, percent
- Default: degrees
- precision=string
- Type of output aspect and slope maps
- Storage type for resultant raster map
- Options: CELL, FCELL, DCELL
- Default: FCELL
- CELL: Integer
- FCELL: Single precision floating point
- DCELL: Double precision floating point
- pcurvature=name
- Name for output profile curvature raster map
- tcurvature=name
- Name for output tangential curvature raster map
- dx=name
- Name for output first order partial derivative dx (E-W slope) raster map
- dy=name
- Name for output first order partial derivative dy (N-S slope) raster map
- dxx=name
- Name for output second order partial derivative dxx raster map
- dyy=name
- Name for output second order partial derivative dyy raster map
- dxy=name
- Name for output second order partial derivative dxy raster map
- zscale=float
- Multiplicative factor to convert elevation units to horizontal units
- Default: 1.0
- min_slope=float
- Minimum slope value (in percent) for which aspect is computed
- Default: 0.0
Table of contents
DESCRIPTION
r.slope.aspect generates raster maps of slope, aspect, curvatures and first and second order partial derivatives from a raster map of true elevation values. The user must specify the input elevation raster map and at least one output raster maps. The user can also specify the format for slope (degrees, percent; default=degrees), and the zscale: multiplicative factor to convert elevation units to horizontal units; (default 1.0).The elevation input raster map specified by the user must contain true elevation values, not rescaled or categorized data. If the elevation values are in other units than in the horizontal units, they must be converted to horizontal units using the parameter zscale. In GRASS GIS 7, vertical units are not assumed to be meters any more. For example, if both your vertical and horizontal units are feet, parameter zscale must not be used.
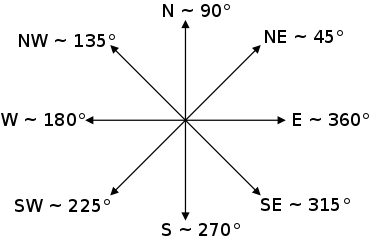
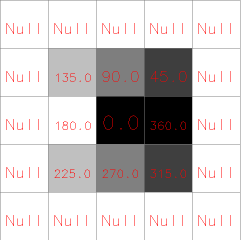
The aspect output raster map indicates the direction that slopes
are facing counterclockwise from East: 90 degrees is North, 180 is
West, 270 is South, 360 is East. Zero aspect indicates flat areas with
zero slope. Category and color table files are also generated for the
aspect raster map.
Note: These values can be transformed to
azimuth values (90 is East, 180 is South, 270 is West, 360 is North)
using r.mapcalc:
# convert angles from CCW from East to CW from North
# modulus (%) can not be used with floating point aspect values
r.mapcalc "azimuth_aspect = if(ccw_aspect == 0, 0, \
if(ccw_aspect < 90, 90 - ccw_aspect, \
450 - ccw_aspect)))"
The aspect for slope equal to zero (flat areas) is set to zero (-9999 with -n flag). Thus, most cells with a very small slope end up having category 0, 45, ..., 360 in aspect output. It is possible to reduce the bias in these directions by filtering out the aspect in areas where the terrain is almost flat. A option min_slope can be used to specify the minimum slope for which aspect is computed. For all cells with slope < min_slope, both slope and aspect are set to zero.
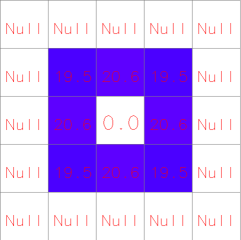
The slope output raster map contains slope values, stated in degrees of inclination from the horizontal if format=degrees option (the default) is chosen, and in percent rise if format=percent option is chosen. Category and color table files are generated.
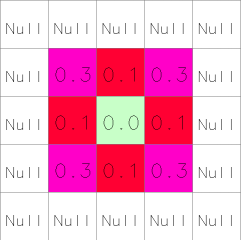
Profile and tangential curvatures are the curvatures in the direction of steepest slope and in the direction of the contour tangent respectively. The curvatures are expressed as 1/metres, e.g. a curvature of 0.05 corresponds to a radius of curvature of 20m. Convex form values are positive and concave form values are negative.
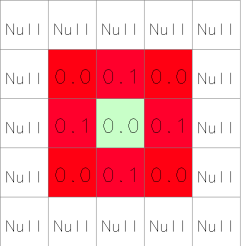
Example DEM
|
||
Slope (degree) from example DEM
|
Aspect (degree) from example DEM
|
|
Tangential curvature (m-1) from example DEM
|
Profile curvature (m-1) from example DEM
|
For some applications, the user will wish to use a reclassified raster map of slope that groups slope values into ranges of slope. This can be done using r.reclass. An example of a useful reclassification is given below:
category range category labels
(in degrees) (in percent)
1 0- 1 0- 2%
2 2- 3 3- 5%
3 4- 5 6- 10%
4 6- 8 11- 15%
5 9- 11 16- 20%
6 12- 14 21- 25%
7 15- 90 26% and higher
The following color table works well with the above
reclassification.
category red green blue
0 179 179 179
1 0 102 0
2 0 153 0
3 128 153 0
4 204 179 0
5 128 51 51
6 255 0 0
7 0 0 0NOTES
To ensure that the raster elevation map is not inappropriately resampled, the settings for the current region are modified slightly (for the execution of the program only): the resolution is set to match the resolution of the elevation raster map and the edges of the region (i.e. the north, south, east and west) are shifted, if necessary, to line up along edges of the nearest cells in the elevation map. If the user really wants the raster elevation map resampled to the current region resolution, the -a flag should be specified.The current mask is ignored.
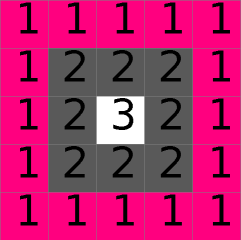
The algorithm used to determine slope and aspect uses a 3x3 neighborhood around each cell in the raster elevation map. Thus, slope and aspect are not determineed for cells adjacent to the edges and NULL cells in the elevation map layer. These cells are by default set to nodata in output raster maps. With the -e flag, output values are estimated for these cells, avoiding cropping along the edges.
Horn's formula is used to find the first order derivatives in x and y directions.
Only when using integer elevation models, the aspect is biased in 0, 45, 90, 180, 225, 270, 315, and 360 directions; i.e., the distribution of aspect categories is very uneven, with peaks at 0, 45,..., 360 categories. When working with floating point elevation models, no such aspect bias occurs.
EXAMPLES
Calculation of slope, aspect, profile and tangential curvature
In this example a slope, aspect, profile and tangential curvature map are computed from an elevation raster map (North Carolina sample dataset):g.region raster=elevation r.slope.aspect elevation=elevation slope=slope aspect=aspect pcurvature=pcurv tcurvature=tcurv # set nice color tables for output raster maps r.colors -n map=slope color=sepia r.colors map=aspect color=aspectcolr r.colors map=pcurv color=curvature r.colors map=tcurv color=curvature
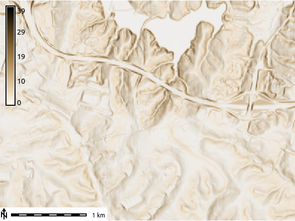
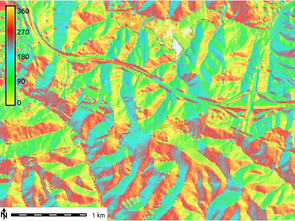
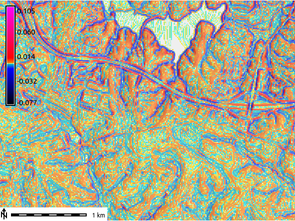
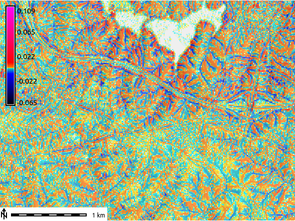
Figure: Slope, aspect, profile and tangential curvature raster map (North Carolina dataset)
Classification of major aspect directions in compass orientation
In the following example (based on the North Carolina sample dataset) we first generate the standard aspect map (oriented CCW from East), then convert it to compass orientation, and finally classify four major aspect directions (N, E, S, W):
g.region raster=elevation -p
# generate integer aspect map with degrees CCW from East
r.slope.aspect elevation=elevation aspect=myaspect precision=CELL
# generate compass orientation and classify four major directions (N, E, S, W)
r.mapcalc "aspect_4_directions = eval( \\
compass=(450 - myaspect ) % 360, \\
if(compass >=0. && compass < 45., 1) \\
+ if(compass >=45. && compass < 135., 2) \\
+ if(compass >=135. && compass < 225., 3) \\
+ if(compass >=225. && compass < 315., 4) \\
+ if(compass >=315., 1) \\
)"
# assign text labels
r.category aspect_4_directions separator=comma rules=- << EOF
1,north
2,east
3,south
4,west
EOF
# assign color table
r.colors aspect_4_directions rules=- << EOF
1 253,184,99
2 178,171,210
3 230,97,1
4 94,60,153
EOF
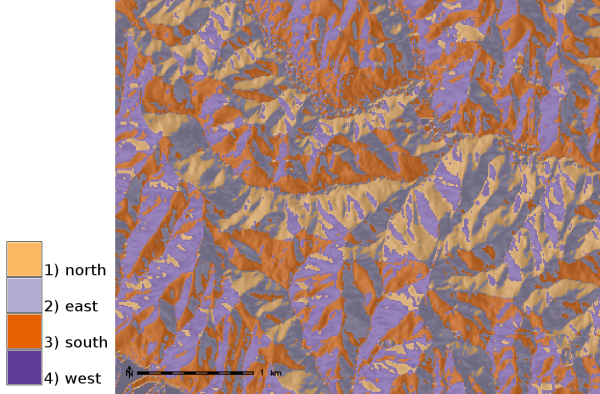
Aspect map classified to four major compass directions (zoomed subset shown)
REFERENCES
- Horn, B. K. P. (1981). Hill Shading and the Reflectance Map, Proceedings of the IEEE, 69(1):14-47.
- Mitasova, H. (1985). Cartographic aspects of computer surface modeling. PhD thesis. Slovak Technical University , Bratislava
- Hofierka, J., Mitasova, H., Neteler, M., 2009. Geomorphometry in GRASS GIS. In: Hengl, T. and Reuter, H.I. (Eds), Geomorphometry: Concepts, Software, Applications. Developments in Soil Science, vol. 33, Elsevier, 387-410 pp, http://www.geomorphometry.org
SEE ALSO
r.mapcalc, r.neighbors, r.reclass, r.rescaleAUTHORS
Michael Shapiro, U.S.Army Construction Engineering Research LaboratoryOlga Waupotitsch, U.S.Army Construction Engineering Research Laboratory
SOURCE CODE
Available at: r.slope.aspect source code (history)
Latest change: Wednesday Mar 02 11:11:57 2022 in commit: 114e87b7d3a3771a01507c741b4c574853642c90
Main index | Raster index | Topics index | Keywords index | Graphical index | Full index
© 2003-2023 GRASS Development Team, GRASS GIS 7.8.9dev Reference Manual