Note: This document is for an older version of GRASS GIS that has been discontinued. You should upgrade, and read the current manual page.
NAME
v.net.visibility - Performs visibility graph construction.KEYWORDS
vector, network, shortest path, visibilitySYNOPSIS
Flags:
- --overwrite
- Allow output files to overwrite existing files
- --help
- Print usage summary
- --verbose
- Verbose module output
- --quiet
- Quiet module output
- --ui
- Force launching GUI dialog
Parameters:
- input=name [required]
- Name of input vector map
- Or data source for direct OGR access
- output=name [required]
- Name for output vector map
- coordinates=east,north
- Coordinates
- visibility=name
- Name of input vector map containing visible points
- Add points after computing the visibility graph
Table of contents
DESCRIPTION
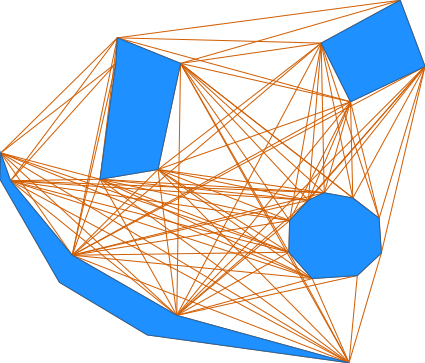
v.net.visibility computes the visibility graph of a vector map containing lines, areas (boundaries) and points. The visibility graph is the graph where the nodes are the end point of the lines, boundaries or simply points. There is an edge between two nodes if they are 'visible' to each other. Two nodes are visibible if there are no segments in between of them, i.e. the edge does not intersect any line or boundary in the vector map. This is useful to compute the shortest path in a vector map from any two points. To do this, first you need to compute the visibility graph and from that to compute the shortest path using v.net.path or d.path.IMPORTANT: the algorithm doesn't work well with intersecting lines (that includes overlapping)
NOTES
If you compute a shortest path after computing the visibility graph you will notice that this path might go through a vertex of a line. If this is not what you wanted you might need to process the map in v.buffer, initially with a small value. Example:v.buffer input=map output=bufferedmap buffer=1 type=point,line,area,boundary
The first argument is the input map. It supports lines, boundaries
(so, areas) and points. For the algorithm was written to work with lines
and boundaries not intersecting each other (that includes overlapping).
The resulting map containing the visibility graph is given in the output map.
If you need to add additional points to compute a shortest path between them afterwards you can use the coordinates parameter, e.g.:
coordinates=25556200,6686400,25556400,6686600
v.net.visibility input=map visibility=vis_map output=new_vis_map \
coordinates=25556200,6686400,25556400,6686600
EXAMPLES
Example 1
A simple example (North Carolina sample data) showing how to use the module:v.extract input=zipcodes_wake output=areas_7_11_25 cats=7,11,25 g.region vector=zipcodes_wake d.mon wx0 d.vect areas_7_11_25 v.net.visibility input=areas_7_11_25 output=graph d.vect graph d.vect areas_7_11_25 color=red type=boundary
Example 2
An example on how to use v.buffer along with the module:v.buffer input=lines output=buffered_lines buffer=1 v.net.visibility input=buffered_lines output=graph d.vect graph d.vect lines col=red
Example 3
An example on how to use the coordinate parameter. This will compute the visibility graph of the vector map lines with the point 2555678,6686343:v.net.visibility input=lines output=graph coordinates=2555678,6686343 d.vect graph d.vect lines col=red
Example 4
An example (North Carolina sample data) on how to use the coordinate parameter with the vis parameter. Here the vector map graph is computed then a new visibility graph is computed from it with the point 669547.97,208348.20 extra:
v.extract input=zipcodes_wake output=areas_7_11_25 cats=7,11,25
g.region vector=zipcodes_wake
d.mon wx0
d.vect areas_7_11_25
v.net.visibility input=areas_7_11_25 output=graph
v.net.visibility input=areas_7_11_25 visibility=graph output=new_graph \
coordinates=669547.97,208348.20
d.erase
d.vect areas_7_11_25
echo "symbol basic/star 20 669547.97 208348.20 black red" | d.graph -m
d.vect new_graph
d.vect areas_7_11_25 color=red type=boundary
Example 5
An example for connections of points (Spearfish):v.net.visibility input=archsites output=graph g.region vector=archsites d.mon wx0 d.vect graph d.vect archsites col=red
Example 6
Here is an example with artificial data.
Load data using here document syntax (Bash and unix-like commands lines only):
v.in.ascii input=- output=simple format=standard <<EOF VERTI: B 6 82.19908257 75.21788991 81.67889908 71.40321101 83.58623853 71.72522936 84.3293578 75.21788991 82.24862385 76.06009174 82.19908257 75.21788991 C 1 1 82.88897401 73.66318782 1 1 C 1 1 90.72645705 75.61248675 1 2 C 1 1 89.37944702 69.51012912 1 3 C 1 1 81.60108979 67.78669725 1 4 B 5 89.92752294 73.95458716 92.37981651 75.11880734 91.56238532 77.29862385 88.96146789 75.88669725 89.92752294 73.95458716 B 10 88.54036697 70.70963303 87.92192518 70.04087417 87.89633028 69.00045872 88.66460807 68.13372867 90.15108904 68.23290821 90.9426344 68.97588202 90.86880734 70.11513761 90.00144697 70.78336312 89.06055046 70.95733945 88.54036697 70.70963303 B 9 78.73119266 71.35366972 80.76238532 68.90137615 84.20550459 66.91972477 89.87798165 65.35917431 83.23494031 66.27685175 80.34278748 68.00837238 78.38484005 71.40292009 78.40917431 72.27018349 78.73119266 71.35366972 EOF
v.net.visibility input=simple output=graph
KNOWN ISSUES
In some cases when 3 points or nodes are collinear, some wrong edges are added. This happens only really rarly and shouldn't be a big problem. When two points have the exact same x coordinate and are visible, some wrong edges are added.SEE ALSO
d.path, v.net, v.net.alloc, v.net.iso, v.net.salesman, v.net.steiner, v.to.dbAUTHOR
Maximilian MaldackerMentor: Wolf Bergenheim
SOURCE CODE
Available at: v.net.visibility source code (history)
Latest change: Thursday May 06 21:02:04 2021 in commit: 07e2f6b6b2ad0a13323197aee19310247e37c3e8
Main index | Vector index | Topics index | Keywords index | Graphical index | Full index
© 2003-2023 GRASS Development Team, GRASS GIS 7.8.9dev Reference Manual