NAME
r.futures.potsurface - Module for computing development potential surface from CSV file created by r.futures.potential and predictorsKEYWORDS
raster, statisticsSYNOPSIS
r.futures.potsurface
r.futures.potsurface --helpr.futures.potsurface input=name subregions=name output=name [separator=character] [--overwrite] [--help] [--verbose] [--quiet] [--ui]
Flags:
- --overwrite
- Allow output files to overwrite existing files
- --help
- Print usage summary
- --verbose
- Verbose module output
- --quiet
- Quiet module output
- --ui
- Force launching GUI dialog
Parameters:
- input=name [required]
- CSV file with coefficients
- subregions=name [required]
- Raster map of subregions
- output=name [required]
- Output probability raster
- separator=character
- Separator used in input CSV file
- Special characters: pipe, comma, space, tab, newline
- Default: comma
Table of contents
DESCRIPTION
Module r.futures.potsurface is a support tool for computing development probability surface based on maps and coefficients selected by r.futures.potential. It computes the initial probability surface used in the patch growing algorithm in r.futures.pga. It is not necessary to use this module, however it is useful to inspect the potential surface to better understand the input data and how the predictors influence the probability. The values range from 0 (unlikely to be developed) to 1 (high probability of development).The inputs are the output file from r.futures.potential and the name of the subregions raster map.
EXAMPLES
r.futures.potsurface input=potential.csv subregions=counties output=pot_surface
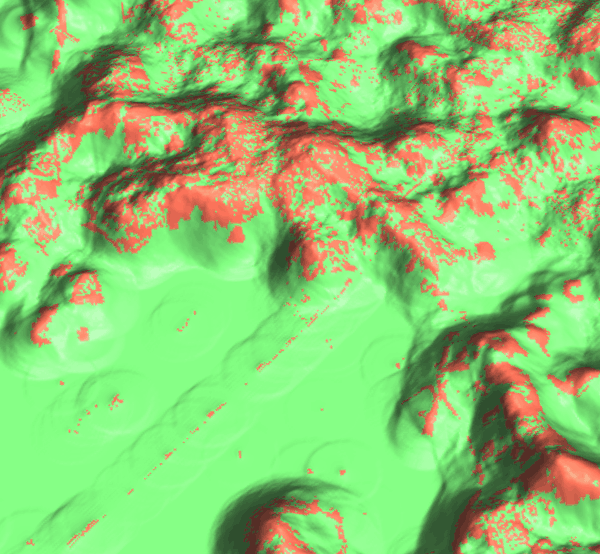
Figure: We can visualize the potential surface in 3D and drape raster representing developed (red) and undeveloped (green) cells over it.
SEE ALSO
FUTURES, r.futures.pga, r.futures.potential, r.futures.devpressure, r.futures.demand, r.futures.calib, r.sample.categoryREFERENCES
- Meentemeyer, R. K., Tang, W., Dorning, M. A., Vogler, J. B., Cunniffe, N. J., & Shoemaker, D. A. (2013). FUTURES: Multilevel Simulations of Emerging Urban-Rural Landscape Structure Using a Stochastic Patch-Growing Algorithm. Annals of the Association of American Geographers, 103(4), 785-807. DOI: 10.1080/00045608.2012.707591
- Dorning, M. A., Koch, J., Shoemaker, D. A., & Meentemeyer, R. K. (2015). Simulating urbanization scenarios reveals tradeoffs between conservation planning strategies. Landscape and Urban Planning, 136, 28-39. DOI: 10.1016/j.landurbplan.2014.11.011
- Petrasova, A., Petras, V., Van Berkel, D., Harmon, B. A., Mitasova, H., & Meentemeyer, R. K. (2016). Open Source Approach to Urban Growth Simulation. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., XLI-B7, 953-959. DOI: 10.5194/isprsarchives-XLI-B7-953-2016
AUTHOR
Anna Petrasova, NCSU GeoForAllSOURCE CODE
Available at: r.futures.potsurface source code (history)
Latest change: Wed Mar 16 11:48:02 2022 in commit: 240e15b24997e1aa5cd10e62682178f4d2bf63d7
Main index | Raster index | Topics index | Keywords index | Graphical index | Full index
© 2003-2022 GRASS Development Team, GRASS GIS 8.0.3dev Reference Manual