Note: This document is for an older version of GRASS GIS that has been discontinued. You should upgrade, and read the current manual page.
NAME
v.isochrones - Creates isochrones from a road map and starting pointsKEYWORDS
vector, network, isochronesSYNOPSIS
Flags:
- -i
- Create individual isochrone map for each starting point
- --overwrite
- Allow output files to overwrite existing files
- --help
- Print usage summary
- --verbose
- Verbose module output
- --quiet
- Quiet module output
- --ui
- Force launching GUI dialog
Parameters:
- map=name [required]
- Roads with speed attribute
- Or data source for direct OGR access
- roads_layer=string [required]
- Layer number of the roads with relevant attributes
- Vector features can have category values in different layers. This number determines which layer to use. When used with direct OGR access this is the layer name.
- Default: 1
- node_layer=string
- Layer number of the nodes on the network (for method=v.net.iso)
- Vector features can have category values in different layers. This number determines which layer to use. When used with direct OGR access this is the layer name.
- Default: 2
- cost_column=name [required]
- Name of speed attribute column (in km/h) or cost column (in minutes)
- start_points=name [required]
- Vector map with starting points for isochrones
- Or data source for direct OGR access
- isochrones=name [required]
- Output vector map with isochrone polygons (Output prefix with flag -i)
- Name for output vector map
- time_steps=float[,float,...] [required]
- Time steps of isochrones (in minutes)
- timemap=name
- Optional output raster map with continuous time from starting points
- Name for output raster map
- offroad_speed=float
- Speed for off-road areas (in km/h > 0)
- Default: 5.0
- memory=integer
- Amount of memory (in MB) use
- Default: 300
- max_distance=float
- Maximum distance (m) from network to include into isochrones
- method=string [required]
- Method to use for isochrone calculation
- Options: v.net.iso, r.cost
- Default: v.net.iso
Table of contents
DESCRIPTION
v.isochrones creates a vector polygon map of isochrones (isochrones) based on a roads map (map) with speed or cost attribute (cost_column), one or several starting points (start_points) and time steps (in minutes) for the isochrones (time_steps). The module is actually a front-end to different GRASS GIS modules, and the user can chose the approach with the method option (see the notes section for details).The spatial precision of the analysis is defined by the current computational region. The user can define this with g.region. Care should be taken to not define a too high resolution for the spatial extent covered. Otherwise the user might be confronted with memory issues.
NOTES
Two approaches are currently implemented in the module:The first (default) approach is based on v.net.iso. The output of that module is then used to assign isochrone values to all pixels based on the nearest road segment that is within a given distance (max_distance). The -i flag allows to calculate a separate isochrone map for each starting point. For this approach, the input road map currently has to be prepared by adding all nodes (using v.net with 'operation=nodes' and the '-c' flag. For each starting point, the algorithm then finds the closest node on the network and calculates the isochrones from there. This allows to use the same network for many analyses without having to go through the time of adding the starting points at each run. In addition, a cost_column has to be present in the attribute table containing for each line segment the time of traversal in minutes (i.e. length/speed).
The second approach is based on r.cost. It transforms the roads to raster (here cost_column has to point to an attribute column containing speed in km/h), assigning a user chosen offroad_speed to all offroad pixels, calculates time cost from the starting points and then transforms the result into discrete vector polygons based on the time steps chosen. Optionally, the user can chose to keep the a raster output of r.cost (timemap). Current region settings are used to define the maximal extension and the resolution at which the cost map is calculated. The memory option allows to decide how much memory the r.cost module can use (see the r.cost man page for more details). One big advantage of the this second approach is that the road network does not have to be topologically clean in order to get meaningful results.
EXAMPLE
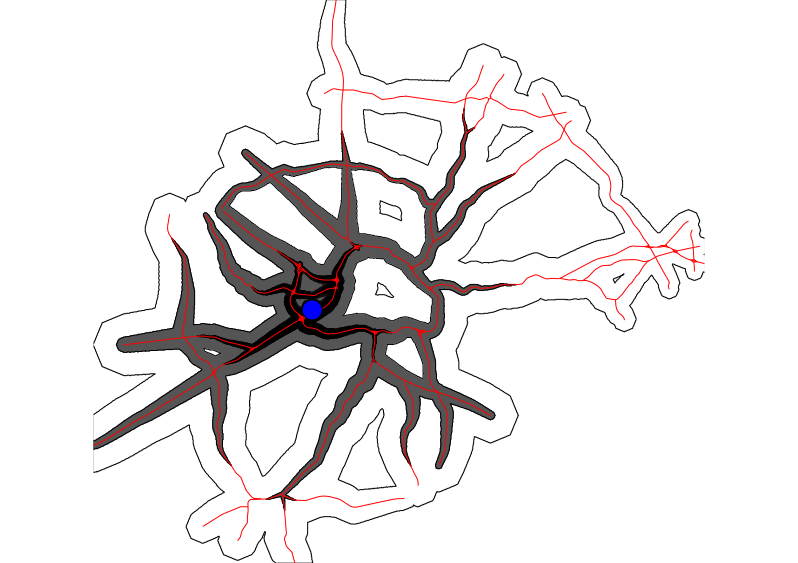
v.net -c input=roadsmajor operation=nodes output=myroads v.db.addcolumn myroads col="speed int" v.db.addcolumn myroads col="length double precision" v.db.addcolumn myroads col="cost double precision" v.db.update myroads col=speed value=120 where="ROAD_NAME='US-1'" v.db.update myroads col=speed value=90 where="(ROAD_NAME like 'US%' AND ROAD_NAME <> 'US-1') OR ROAD_NAME like 'I-%'" v.db.update myroads col=speed value=50 where="speed is null" v.to.db myroads op=length col=length v.db.update myroads col=cost qcol="(length/(speed*1000))*60" g.region vector=myroads res=50 -a -p echo "634637|224663" | v.in.ascii input=- output=start x=1 y=2 v.isochrones map=myroads cost_column=cost start_points=start isochrones=isochrones_vnetiso time_steps=15,30,60 \ max_distance=1000 method=v.net.iso

15, 30 and 60 minute isochrones from the start point using method v.net.iso
v.isochrones map=myroads cost_column=speed start_points=start isochrones=isochrones_rcost time_steps=15,30,60 \ method=r.cost memory=1000
15, 30 and 60 minute isochrones from the start point using method r.cost
SEE ALSO
r.cost, v.net.isoAUTHOR
Moritz LennertSOURCE CODE
Available at: v.isochrones source code (history)
Latest change: Thursday Feb 20 13:02:26 2025 in commit: 53de8196a10ba5a8a9121898ce87861d227137e3
Main index | Vector index | Topics index | Keywords index | Graphical index | Full index
© 2003-2024 GRASS Development Team, GRASS GIS 8.3.3dev Reference Manual