r.walk
Creates a raster map showing the anisotropic cumulative cost of moving between different geographic locations on an input raster map whose cell category values represent cost.
r.walk [-knrib] elevation=name friction=name output=name [solver=name] [nearest=name] [outdir=name] [start_points=name] [stop_points=name] [start_raster=name] [start_coordinates=east,north [,east,north,...]] [stop_coordinates=east,north [,east,north,...]] [max_cost=value] [null_cost=value] [memory=memory in MB] [walk_coeff=a,b,c,d] [lambda=float] [slope_factor=float] [--overwrite] [--verbose] [--quiet] [--qq] [--ui]
Example:
r.walk elevation=name friction=name output=name
grass.tools.Tools.r_walk(elevation, friction, output, solver=None, nearest=None, outdir=None, start_points=None, stop_points=None, start_raster=None, start_coordinates=None, stop_coordinates=None, max_cost=0, null_cost=None, memory=300, walk_coeff="0.72,6.0,1.9998,-1.9998", lambda=1.0, slope_factor=-0.2125, flags=None, overwrite=None, verbose=None, quiet=None, superquiet=None)
Example:
tools = Tools()
tools.r_walk(elevation="name", friction="name", output="name")
This grass.tools API is experimental in version 8.5 and expected to be stable in version 8.6.
grass.script.run_command("r.walk", elevation, friction, output, solver=None, nearest=None, outdir=None, start_points=None, stop_points=None, start_raster=None, start_coordinates=None, stop_coordinates=None, max_cost=0, null_cost=None, memory=300, walk_coeff="0.72,6.0,1.9998,-1.9998", lambda=1.0, slope_factor=-0.2125, flags=None, overwrite=None, verbose=None, quiet=None, superquiet=None)
Example:
gs.run_command("r.walk", elevation="name", friction="name", output="name")
Parameters
elevation=name [required]
Name of input elevation raster map
friction=name [required]
Name of input raster map containing friction costs
output=name [required]
Name for output raster map to contain walking costs
solver=name
Name of input raster map solving equal costs
Helper variable to pick a direction if two directions have equal cumulative costs (smaller is better)
nearest=name
Name for output raster map with nearest start point
outdir=name
Name for output raster map to contain movement directions
start_points=name
Name of starting vector points map
Or data source for direct OGR access
stop_points=name
Name of stopping vector points map
Or data source for direct OGR access
start_raster=name
Name of starting raster points map
start_coordinates=east,north [,east,north,...]
Coordinates of starting point(s) (E,N)
stop_coordinates=east,north [,east,north,...]
Coordinates of stopping point(s) (E,N)
max_cost=value
Maximum cumulative cost
Default: 0
null_cost=value
Cost assigned to null cells. By default, null cells are excluded
memory=memory in MB
Maximum memory to be used (in MB)
Cache size for raster rows
Default: 300
walk_coeff=a,b,c,d
Coefficients for walking energy formula parameters a,b,c,d
Default: 0.72,6.0,1.9998,-1.9998
lambda=float
Lambda coefficients for combining walking energy and friction cost
Default: 1.0
slope_factor=float
Slope factor determines travel energy cost per height step
Default: -0.2125
-k
Use the 'Knight's move'; slower, but more accurate
-n
Keep null values in output raster map
-r
Start with values in raster map
-i
Print info about disk space and memory requirements and exit
-b
Create bitmask encoded directions
--overwrite
Allow output files to overwrite existing files
--help
Print usage summary
--verbose
Verbose module output
--quiet
Quiet module output
--qq
Very quiet module output
--ui
Force launching GUI dialog
elevation : str | np.ndarray, required
Name of input elevation raster map
Used as: input, raster, name
friction : str | np.ndarray, required
Name of input raster map containing friction costs
Used as: input, raster, name
output : str | type(np.ndarray) | type(np.array) | type(gs.array.array), required
Name for output raster map to contain walking costs
Used as: output, raster, name
solver : str | np.ndarray, optional
Name of input raster map solving equal costs
Helper variable to pick a direction if two directions have equal cumulative costs (smaller is better)
Used as: input, raster, name
nearest : str | type(np.ndarray) | type(np.array) | type(gs.array.array), optional
Name for output raster map with nearest start point
Used as: output, raster, name
outdir : str | type(np.ndarray) | type(np.array) | type(gs.array.array), optional
Name for output raster map to contain movement directions
Used as: output, raster, name
start_points : str, optional
Name of starting vector points map
Or data source for direct OGR access
Used as: input, vector, name
stop_points : str, optional
Name of stopping vector points map
Or data source for direct OGR access
Used as: input, vector, name
start_raster : str | np.ndarray, optional
Name of starting raster points map
Used as: input, raster, name
start_coordinates : list[tuple[float, float]] | tuple[float, float] | list[float] | str, optional
Coordinates of starting point(s) (E,N)
Used as: input, coords, east,north
stop_coordinates : list[tuple[float, float]] | tuple[float, float] | list[float] | str, optional
Coordinates of stopping point(s) (E,N)
Used as: input, coords, east,north
max_cost : int, optional
Maximum cumulative cost
Used as: value
Default: 0
null_cost : float, optional
Cost assigned to null cells. By default, null cells are excluded
Used as: value
memory : int, optional
Maximum memory to be used (in MB)
Cache size for raster rows
Used as: memory in MB
Default: 300
walk_coeff : tuple[str, str, str, str] | list[str] | str, optional
Coefficients for walking energy formula parameters a,b,c,d
Used as: a,b,c,d
Default: 0.72,6.0,1.9998,-1.9998
lambda : float, optional
Lambda coefficients for combining walking energy and friction cost
Default: 1.0
slope_factor : float, optional
Slope factor determines travel energy cost per height step
Default: -0.2125
flags : str, optional
Allowed values: k, n, r, i, b
k
Use the 'Knight's move'; slower, but more accurate
n
Keep null values in output raster map
r
Start with values in raster map
i
Print info about disk space and memory requirements and exit
b
Create bitmask encoded directions
overwrite : bool, optional
Allow output files to overwrite existing files
Default: None
verbose : bool, optional
Verbose module output
Default: None
quiet : bool, optional
Quiet module output
Default: None
superquiet : bool, optional
Very quiet module output
Default: None
Returns:
result : grass.tools.support.ToolResult | np.ndarray | tuple[np.ndarray] | None
If the tool produces text as standard output, a ToolResult object will be returned. Otherwise, None will be returned. If an array type (e.g., np.ndarray) is used for one of the raster outputs, the result will be an array and will have the shape corresponding to the computational region. If an array type is used for more than one raster output, the result will be a tuple of arrays.
Raises:
grass.tools.ToolError: When the tool ended with an error.
elevation : str, required
Name of input elevation raster map
Used as: input, raster, name
friction : str, required
Name of input raster map containing friction costs
Used as: input, raster, name
output : str, required
Name for output raster map to contain walking costs
Used as: output, raster, name
solver : str, optional
Name of input raster map solving equal costs
Helper variable to pick a direction if two directions have equal cumulative costs (smaller is better)
Used as: input, raster, name
nearest : str, optional
Name for output raster map with nearest start point
Used as: output, raster, name
outdir : str, optional
Name for output raster map to contain movement directions
Used as: output, raster, name
start_points : str, optional
Name of starting vector points map
Or data source for direct OGR access
Used as: input, vector, name
stop_points : str, optional
Name of stopping vector points map
Or data source for direct OGR access
Used as: input, vector, name
start_raster : str, optional
Name of starting raster points map
Used as: input, raster, name
start_coordinates : list[tuple[float, float]] | tuple[float, float] | list[float] | str, optional
Coordinates of starting point(s) (E,N)
Used as: input, coords, east,north
stop_coordinates : list[tuple[float, float]] | tuple[float, float] | list[float] | str, optional
Coordinates of stopping point(s) (E,N)
Used as: input, coords, east,north
max_cost : int, optional
Maximum cumulative cost
Used as: value
Default: 0
null_cost : float, optional
Cost assigned to null cells. By default, null cells are excluded
Used as: value
memory : int, optional
Maximum memory to be used (in MB)
Cache size for raster rows
Used as: memory in MB
Default: 300
walk_coeff : tuple[str, str, str, str] | list[str] | str, optional
Coefficients for walking energy formula parameters a,b,c,d
Used as: a,b,c,d
Default: 0.72,6.0,1.9998,-1.9998
lambda : float, optional
Lambda coefficients for combining walking energy and friction cost
Default: 1.0
slope_factor : float, optional
Slope factor determines travel energy cost per height step
Default: -0.2125
flags : str, optional
Allowed values: k, n, r, i, b
k
Use the 'Knight's move'; slower, but more accurate
n
Keep null values in output raster map
r
Start with values in raster map
i
Print info about disk space and memory requirements and exit
b
Create bitmask encoded directions
overwrite : bool, optional
Allow output files to overwrite existing files
Default: None
verbose : bool, optional
Verbose module output
Default: None
quiet : bool, optional
Quiet module output
Default: None
superquiet : bool, optional
Very quiet module output
Default: None
DESCRIPTION
r.walk computes anisotropic cumulative cost of moving between different geographic locations on an input elevation raster map whose cell category values represent elevation combined with an input raster map layer whose cell values represent friction cost.
r.walk outputs 1) a raster map showing the lowest cumulative cost (time) of moving between each cell and the user-specified starting points and 2) a second raster map showing the movement direction to the next cell on the path back to the start point (see Movement Direction). It uses an input elevation raster map whose cell category values represent elevation, combined with a second input raster map whose cell values represent friction costs.
This function is similar to r.cost, but in addition to a friction map, it considers an anisotropic travel time due to the different walking speed associated with downhill and uphill movements.
NOTES
The formula from Aitken 1977/Langmuir 1984 (based on Naismith's rule for walking times) has been used to estimate the cost parameters of specific slope intervals:
T = a*delta_S + b*delta_H_uphill + c*delta_H_moderate_downhill + d*delta_H_steep_downhill
where:
Tis time of movement in seconds,delta Sis the horizontal distance covered in meters,delta His the altitude difference in meters.
The a, b, c, d walk_coeff parameters take in account movement speed in the different conditions and are linked to:
- a: time in seconds it takes to walk for 1 meter a flat surface (1/walking speed)
- b: additional walking time in seconds, per meter of elevation gain on uphill slopes
- c: additional walking time in seconds, per meter of elevation loss on moderate downhill slopes (use positive value for decreasing cost)
- d: additional walking time in seconds, per meter of elevation loss on steep downhill slopes (use negative value for increasing cost)
It has been proved that moving downhill is favourable up to a specific slope value threshold, after that it becomes unfavourable. The default slope value threshold (slope_factor) is -0.2125, corresponding to tan(-12), calibrated on human behaviour (>5 and \<12 degrees: moderate downhill; >12 degrees: steep downhill). The default values for a, b, c, d walk_coeff parameters are those proposed by Langmuir (0.72, 6.0, 1.9998, -1.9998), based on man walking effort in standard conditions.
The friction cost parameter represents a time penalty in seconds of additional walking time to cross 1 meter distance. Friction cost can be any floating point value ≥ 0. A friction map is a required parameter; if no friction costs are desired, a friction map should be a raster in which all cells have a value of 0.
The lambda parameter is a dimensionless scaling factor of the friction cost:
total cost = movement time cost + lambda * friction costs * delta_S
For a more accurate result, the "knight's move" option can be used (although it is more time consuming). In the diagram below, the center location (O) represents a grid cell from which cumulative distances are calculated. Those neighbours marked with an x are always considered for cumulative cost updates. With the "knight's move" option, the neighbours marked with a K are also considered.
K K
K x x x K
x O x
K x x x K
K K
The minimum cumulative costs are computed using Dijkstra's algorithm, that find an optimum solution (for more details see r.cost, that uses the same algorithm).
Movement Direction
The movement direction surface is created to record the sequence of movements that created the cost accumulation surface. This movement direction surface can be used by r.path to recover a path from an end point back to the start point. The direction of each cell points towards the next cell. The directions are recorded as degrees CCW from East:
112.5 67.5 i.e. a cell with the value 135
157.5 135 90 45 22.5 means the next cell is to the north-west
180 x 360
202.5 225 270 315 337.5
247.5 292.5
Once r.walk computes the cumulative cost map as a linear combination of friction cost (from friction map) and the altitude and distance covered (from the digital elevation model), the associated movement direction map can be used by r.path to find the minimum cost path.
r.walk, like most all GRASS raster programs, is also made to be run on maps larger that can fit in available computer memory. As the algorithm works through the dynamic list of cells it can move almost randomly around the entire area. r.walk divides the entire area into a number of pieces and swaps these pieces in and out of memory (to and from disk) as needed. This provides a virtual memory approach optimally designed for 2-D raster maps. The amount of memory to be used by r.walk can be controlled with the memory option, default is 300 MB. For systems with less memory this value will have to be set to a lower value.
EXAMPLES
We compute a map showing how far a lost person could get from the point where he or she was last seen while taking into account the topography and landcover.
g.region swwake_30m -p
# create friction map based on land cover
r.recode landclass96 out=friction rules=- << EOF
1:3:0.1:0.1
4:5:10.:10.
6:6:1000.0:1000.0
7:7:0.3:0.3
EOF
r.walk -k elevation=elev_ned_30m friction=friction output=walkcost \
start_coordinates=635576,216485 lambda=0.5 max=10000
# compute contours on the cost surface to better understand
# how far the person can get in certain time (1000 is in seconds)
r.contour walkcost output=walkcost step=1000
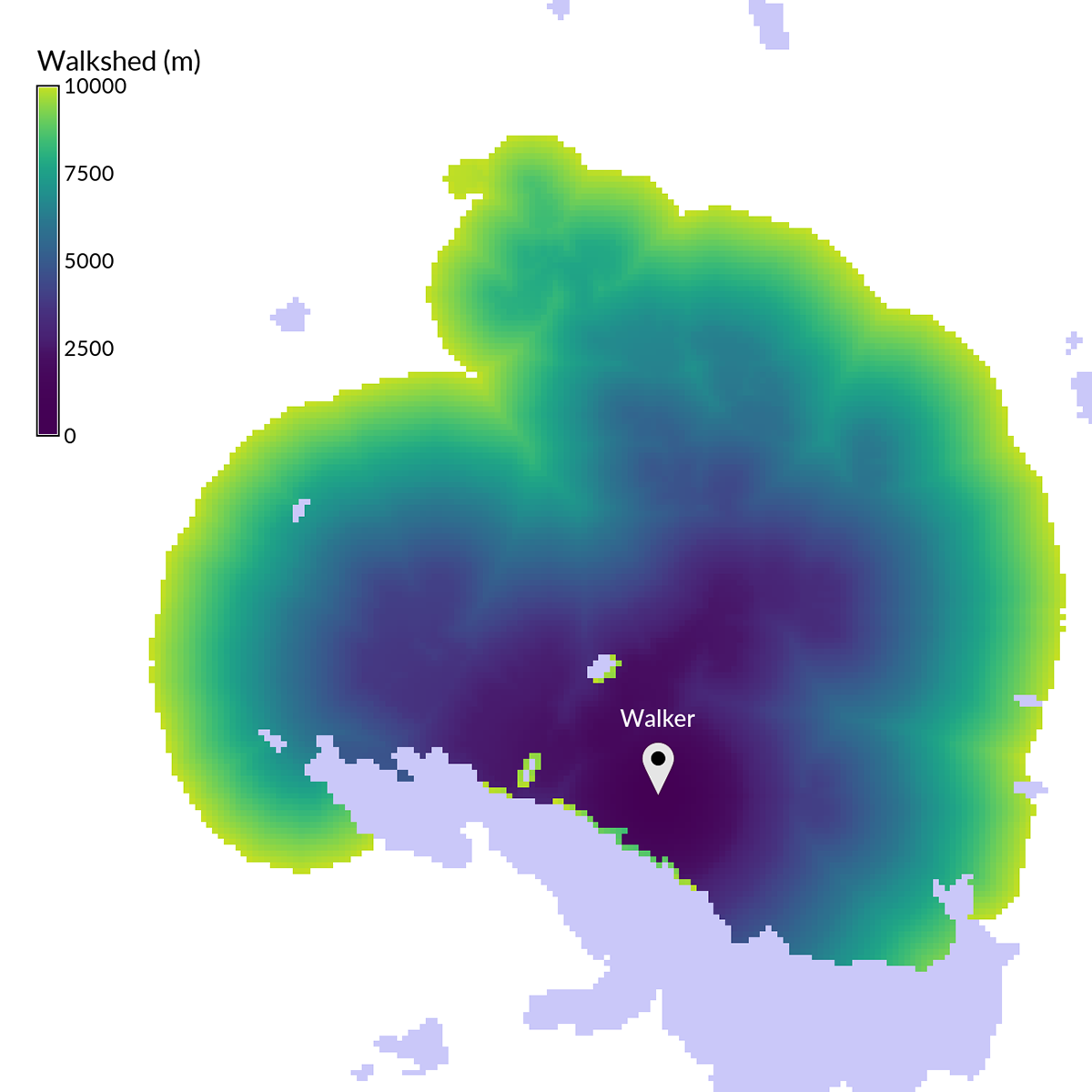
Figure: Walkshed over a cost surface derived from topography and
landcover
REFERENCES
- Aitken, R. 1977. Wilderness areas in Scotland. Unpublished Ph.D. thesis. University of Aberdeen.
- Steno Fontanari, University of Trento, Italy, Ingegneria per l'Ambiente e il Territorio, 2000-2001.
- Langmuir, E. 1984. Mountaincraft and leadership. The Scottish Sports Council/MLTB. Cordee, Leicester.
SEE ALSO
r.cost, r.path, r.in.ascii, r.mapcalc, r.recode, r.out.ascii
AUTHORS
Based on r.cost written by :
Antony Awaida, Intelligent Engineering, Systems Laboratory, M.I.T.
James Westervelt, U.S.Army Construction Engineering Research
Laboratory
Updated for Grass 5 by Pierre de Mouveaux (pmx@audiovu.com)
Initial version of r.walk:
Steno Fontanari, 2002
Current version of r.walk:
Franceschetti Simone, Sorrentino Diego, Mussi Fabiano and Pasolli
Mattia
Correction by: Fontanari Steno, Napolitano Maurizio and Flor Roberto
In collaboration with: Franchi Matteo, Vaglia Beatrice, Bartucca Luisa,
Fava Valentina and Tolotti Mathias, 2004
Updated for GRASS 6.1:
Roberto Flor and Markus Neteler
Updated for GRASS GIS 7:
Markus Metz
Multiple path directions sponsored by
mundialis
SOURCE CODE
Available at: r.walk source code
(history)
Latest change: Monday Feb 09 18:47:00 2026 in commit 8cec756