NAME
r.damflood - Estimate the area potentially inundated in case of dam breakKEYWORDS
raster, dambreak, modelSYNOPSIS
Flags:
- -d
- Flow direction additional output (aspect visualization)
- --overwrite
- Allow output files to overwrite existing files
- --help
- Print usage summary
- --verbose
- Verbose module output
- --quiet
- Quiet module output
- --ui
- Force launching GUI dialog
Parameters:
- method=string
- Computational method for initial velocity estimation
- Options: dambreak-without_hypotesis, uniform drop in of lake, small dam breach
- Default: dambreak-without_hypotesis
- timestep=float
- Initial computational time step [s] - CFL condition
- Default: 0.01
- elev=string [required]
- Name of elevation raster map (including lake bathymetry and dam)
- lake=string [required]
- Name of water depth raster map
- dambreak=string [required]
- Name of dam breach width raster map
- manning=string [required]
- Name of Manning's roughness coefficient raster map
- tstop=integer [required]
- Simulation time duration [s]
- u=string
- Initial velocity along the east direction [m/s]
- v=string
- Initial velocity along the north direction [m/s]
- deltat=integer
- Time-lag for output generation [s]
- opt_t=float[,float,...]
- Additional instants for output map generation [s]
- h=string
- Prefix for water depth output raster maps
- vel=string
- Prefix for water velocity output raster maps
- hmax=string
- Name of output maximum water depth raster map; relative intensity [h*v] and time map are also generated
- vmax=string
- Name of output maximum water velocity raster map; relative intensity [h*v] and time map are also generated
- imax=string
- Name of output maximum intensity [h*v] raster map; relative time map are also generated
- wavefront=string
- Name of output wave front time[s] raster map
Table of contents
DESCRIPTION
r.damflood - The definition of flooding areas is of considerable importance for both the risk analysis and the emergency management. This command, in particular, is an embedded GRASS GIS hydrodynamic 2D model that allows to obtain flooding area due to a failure of a dam, given the geometry of the reservoir and of the downstream area, the initial conditions and the dam breach geometry.The numerical model solves the conservative form of the shallow water equations (SWE) using a finite volume method (FVM); the intercell flux is computed by the "upwind method and the water-level gradient is evaluated by weighted average of both upwind and downwind gradient. Additional details of the specific numerical scheme adopted in the model are presented in references [1].
The command allows to generate raster time series, of water depth and flow velocity, with time resolution defined by user. Each time series is identified by a number of raster maps named with a common prefix as specified by the user and the time instant which it refers expressed in seconds from the dam failure, joined by the underscore character (e.g.; myvel_125, myvel_250, myvel_375, etc.).
Because this new module has been implemented with the aim to provide an instrument for risk assessment fully within a GIS environment, it should be able to provide intensity maps directly applicable in those analyses.In floods, intensity generally corresponds to the maximum flow depth, but in the particular case of flash floods, where velocities are normally high, it is recommended to use as intensity indicator the maximum between the water depth and the product of water velocity and water depth. For this reason, with this module, in addition to the water depth and velocity maps, the user can choose a variety of output raster maps: maximum water depth, maximum water velocity, and maximum intensity raster maps.
In case on high numerical stability problem, the user is warned, and the simulation is stopped.
Use
Requested input: Last changed: $27 februar 2013 09:40:00 CET $ Available at: r.damflood source code (history)
Main index |
Raster index |
Topics index |
Keywords index |
Graphical index |
Full index
© 2003-2020
GRASS Development Team,
GRASS GIS 7.8.3dev Reference Manual
The required input are:
- a DTM including the lake bathimetry and the dam elevation over the ground [elev],
- a map with the initial condition easily obtained with r.lake command [lake],
- a dam breach width raster map [dambreak] which can be obtained using r.dam grass add-on script,
- a Manning's roughness coefficient raster map, easily obtained from a reclassification of a land use map
(r.reclass) [manning],
- the simulation time length expressed in seconds [tstop].
Output map and additional output options:
First the user can set a specific time lag [deltat] expressed in seconds, that is used for the output map (depth and velocity) generation.
and also an additional series of instants [opt_t],expressed in seconds from the beginning of the simulation), used to generate further water flow depth and velocity maps
at desired precise times.
The user can choose between one of the following time series raster maps as output:
- flow depth [h],
- flow velocity [vel],
- a raster map with maximum water depth [hmax], relative flooding intensity [i_hmax], that is the product of water depth and velocity, and the relative time of occurence[t_hmax],
- a raster map with maximum water velocity [vmax], relative flooding intensity [i_vmax], and the relative time of occurence[t_vmax],
- a raster map with maximum flooding intensity [imax] and the relative time of occurence[t_imax].
- a raster map with the time of arriving of the Wave-Front [wavefront]
where and the raster maps are coded as "prefix" + "_" + "elapsed seconds": e.g. mydepth_125.
Obviously at least one output map prefix must be specified.
The unit of measurements of output raster maps are expresssed using the International System (S.I.).
Options:
Using a specific flag, the user can obtain another raster map with flow directions that can be visualized using a specific display command
(d.rast.arrow) of the GRASS GIS software.
Actually two different dam failure type are considered by the command: (i) full breach, (ii) partial breach.
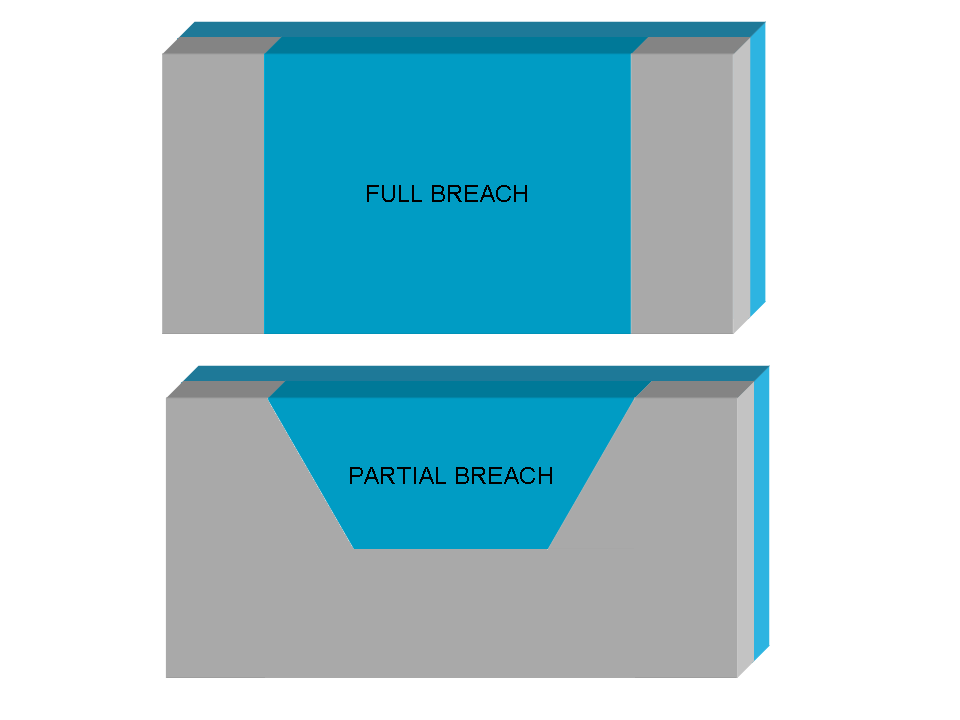
In case of total istantaeous dam break (configuration i), the initial velocity is computed directly applying the SWE at the first time step;
while in case of partial dam breach (configuration ii) the user can choose between don't use any hypothesis, like in the previous configuration,
or evaluate the initial velocity using the overflow spillway equation:
V = 0.4 √(2 g h)
where V is the water flow velocity expressed in m/s,
g is the gravitational acceleration expressed in m/s2
and h is the water depth in correspondence of the dam breach expresssed in meters (m).
Optionally the user may modify the initial timestep used for the numerical solution of the SWE (default value = 0.01 s), nevertheless the timestep [],
and choose a specific failure tipe corresponding to different computational method for the initial velocity estimation.
Notes
(GRASS ANSI C command)
AUTHORS
Roberto Marzocchi (e-mail) and Massimiliano Cannata (e-mail).
The GRASS tool was developed by Institute of earth science (IST),
University of applied science of Italian Switzerland (SUPSI), Lugano - Division of geomatics web-page
Actually the debug is assured by:
- Gter srl (Genoa, Italy)
- IST -SUPSI (Lugano, Switzerland)
The numerical model, originally developed by the National Center for Computational Hydroscience and Engineering of the University of Mississippi,
has been reformulated and modified by the authors introducing important new features to consider the numerical stability and the type of dam failure,
and currently is written in ANSI C programming language within GRASS.
SEE ALSO
r.lake,
r.reclass,
d.rast.arrow,
r.inund.fluv.
Details of the numerical model are presented in references.
Details of use and developing of are available here.
REFERENCES
[1] Cannata M. & Marzocchi R. (2012). Two-dimensional dam break flooding simulation: a GIS embedded approach. - Natural Hazards 61(3):1143-1159
[2] Pdf presentation of the work at the "X Meeting degli Utenti Italiani di GRASS - GFOSS" (It) web-page
[3] Pdf presentation of the work at the FOSS4G 2009 (En) - web-page
[4] Pdf presentation of the work at the Geoitalia 2011 conference (En)- document
SOURCE CODE