NAME
r.forestfrag - Computes the forest fragmentation index (Riitters et al. 2000)KEYWORDS
raster, landscape structure analysis, forest, fragmentation index, RiittersSYNOPSIS
Flags:
- -r
- Set computational region to input raster map
- -t
- Keep Pf and Pff maps
- -s
- Run r.report on output map
- -a
- Trim the output map to avoid border effects
- --overwrite
- Allow output files to overwrite existing files
- --help
- Print usage summary
- --verbose
- Verbose module output
- --quiet
- Quiet module output
- --ui
- Force launching GUI dialog
Parameters:
- input=name [required]
- Name of forest raster map (where forest=1, non-forest=0)
- output=name [required]
- Name for output raster map
- size=number
- Moving window size (odd number)
- Options: 3-
- Default: 3
- pf=name
- Name for output Pf (forest area density) raster map
- Proportion of area which is forested (amount of forest)
- pff=name
- Name for output Pff (forest connectivity) raster map
- Conditional probability that neighboring cell is forest
- window=integer
- This option is deprecated, use the option size instead
- Options: 3-
Table of contents
DESCRIPTION
r.forestfrag Computes the forest fragmentation following the methodology proposed by Riitters et al. (2000). See this article for a detailed explanation.It follows a "sliding window" algorithm with overlapping windows. The amount of forest and its occurence as adjacent forest pixels within fixed- area "moving-windows" surrounding each forest pixel is measured. The window size is user-defined. The result is stored at the location of the center pixel. Thus, a pixel value in the derived map refers to "between-pixel" fragmentation around the corresponding forest location.
As input it requires a binary map with (1) forest and (0) non-forest. Obviously, one can replace forest any other land cover type. If one wants to exclude the influence of a specific land cover type, e.g., water bodies, it should be classified as no-data (NA) in the input map. See e.g., blog post.
Let Pf be the proportion of pixels in the window that are forested. Define Pff (strictly) as the proportion of all adjacent (cardinal directions only) pixel pairs that include at least one forest pixel, for which both pixels are forested. Pff thus (roughly) estimates the conditional probability that, given a pixel of forest, its neighbor is also forest. The classification model then identifies six fragmentation categories as:
interior: Pf = 1.0 patch: Pf < 0.4 transitional: 0.4 ≤ Pf < 0.6 edge: Pf ≥ 0.6 and Pf - Pff < 0 perforated: Pf ≥ 0.6 and Pf - Pff > 0 undetermined: Pf ≥ 0.6 and Pf = Pff
NOTES
- The moving window size is user-defined (default=3) and must be an odd number. If an even number is given the function will stop with an error message.
- No-data cells are ignored. This means that statistics at the raster edges are based on fewer cells (smaller) moving windows. If this is a problem, the user can choose to have the output raster trimmed with a number of raster cells equal to 1/2 * the size of the moving window.
- The function respects the region. The user has however the option to set the region to match the input layer.
EXAMPLE
In the North Carolina sample Location, set the computational region to match the land classification raster map:g.region raster=landclass96
r.mapcalc "forest = if(landclass96 == 5, 1, 0)"
r.forestfrag input=forest output=fragmentation window=7
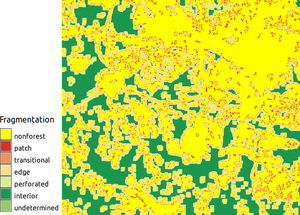
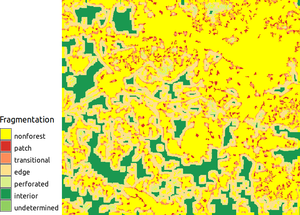
Two forest fragmentation indices with window size 7 (left) and 11 (right) show how increasing window size increases the amount of edges.
SEE ALSO
r.mapcalc, r.liThe addon is based on the r.forestfrag.sh script, with as extra options user-defined moving window size, option to trim the region (by default it respects the region) and a better handling of no-data cells.
AUTHORS
- Emmanuel Sambale (original shell version)
- Stefan Sylla (original shell version)
- Paulo van Breugel (Python version, user-defined moving window size)
- Vaclav Petras (major code clean up)
REFERENCES
Riitters, K., J. Wickham, R. O'Neill, B. Jones, and E. Smith. 2000. Global-scale patterns of forest fragmentation. Conservation Ecology 4(2): 3. [online] URL: http://www.consecol.org/vol4/iss2/art3/SOURCE CODE
Available at: r.forestfrag source code (history)
Main index | Raster index | Topics index | Keywords index | Graphical index | Full index
© 2003-2020 GRASS Development Team, GRASS GIS 7.8.3dev Reference Manual