Note: This document is for an older version of GRASS GIS that has been discontinued. You should upgrade, and read the current manual page.
NAME
r.connectivity.network - Compute connectivity measures for a set of habitat patches based on graph-theoryKEYWORDS
raster, vector, graph theory, network, network analysisSYNOPSIS
Flags:
- -x
- Visualise negative exponential decay kernel and exit
- -i
- Install required R packages in an interactive session if they are missing
- -r
- Remove indirect connections from network
- --overwrite
- Allow output files to overwrite existing files
- --help
- Print usage summary
- --verbose
- Verbose module output
- --quiet
- Quiet module output
- --ui
- Force launching GUI dialog
Parameters:
- input=Network computed with r.connectivity.distance (input) [required]
- Name of input vector map
- Name of input vector map containing the network produced with r.connectivity.distance
- qml_style=name
- Directory for output of QML files for layer styling in QGIS
- prefix=string [required]
- Prefix for output tables
- connectivity_cutoff=float
- Maximum cost distance for connectivity
- Default: 0.0
- lnbh_cutoff=float
- Threshold defining a locale neighborhood (neighborhood = number of times connectivity_cutoff)
- Default: 3.0
- convergence_threshold=float
- Convergence threshold for the overview plot over the graph
- Default: 0.05
- cl_thresh=integer
- Number of community levels to be traced in edge betweenness community
- Default: 0
- base=float
- A factor for defining the shape of the negative exponential decay kernel (e ^ base * exponent)
- Default: -3.0
- exponent=float
- Exponent of the negative exponential decay kernel (e ^ base * exponent)
- Default: -4.5
- kernel_plot=name
- File name for a plot of the negative exponential decay kernel (e ^ base * exponent) used in analysis (requires ghostscript installed)
- overview_plot=name
- File name for a plot of an overview over network characteristics (requires ghostscript installed)
- cores=integer
- Number of cores to be used for computation (if <= 1 no parallelisation is applied)
- Default: 1
Table of contents
DESCRIPTION
r.connectivity.network is the 2nd tool of the r.connectivity.* tool-set and performs network analysis (using the igraph-package in R). It requires a network dataset produced with r.connectivity.distance, and conducts analysis on the graph, edge and vertex level.The analysis is based on a negative exponential decay kernel (as described e.g. in Bunn et al. (2000), which characterizes the probability of dispersal over increasing cost distance. The user can modify the function and thus form of the kernel according to the dispersal characteristics of her/his species or habitat type. Form of the curve can be controlled with the base and exponent options. The resulting kernel can be visually inspected using the x-flag. If the kernel_plot option is given a plot of the kernel is saved in the format depending on the ending of the file name defined by the user.
If an overview plot is requested in the overview option, network characteristics are visualised in a plot showing an overview over:- the number of connections,
- the number of components (clusters) and
- the size of the largest network component within the network
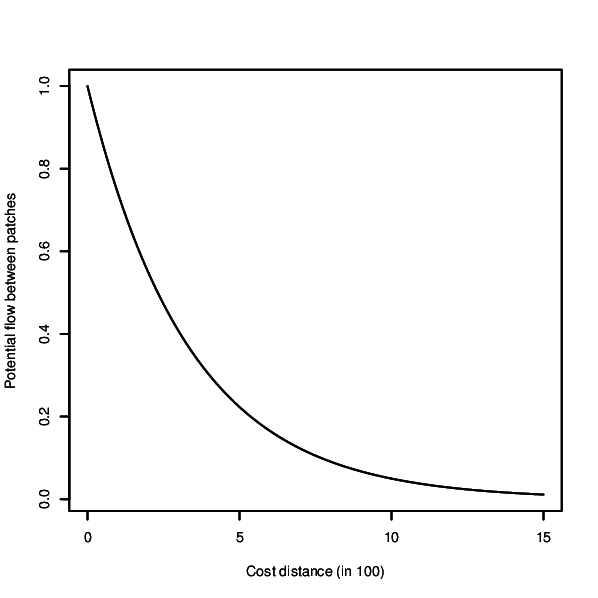
Figure: Dispersal kernel used for network analysis in the example below.
Output column names
Due to limitations in dbf, the length of field names is limited to ten signs. Thus, names of the edge and vertex measures are abbreviated in the vector attribute table. This was (mostly) done using the following pattern for column names (of vertex and edge measures):- weight _ measure _ (sub)graph
(Sub)Graphs
In r.connectivity.network a graph is built from the network dataset produced in r.connectivity.distance. From this full and directed graph a set of (sub)graphs is extracted, specified by:- u = for the undirected graph
- d = for the graph with only direct edges
- c = for the graph with only edges shorter than the cost distance threshold
Graph measures
- Number of edges
- The number of edges is the number of connections between pairs of vertices in the network.
- Number of vertices
- The number of vertices is the number of polygons (patches) from the input vector map which are analysed in the r.connectivity.*.
- Cluster
- A cluster is a group of vertices which are connected with each other, but not with the rest of vertices in a graph (a single isolated vertex can be a cluster as well).
- Diameter
- The diameter of a graph is the length of the longest geodesic.
- Density
- The density of a graph is the ratio of the number of edges and the number of possible edges.
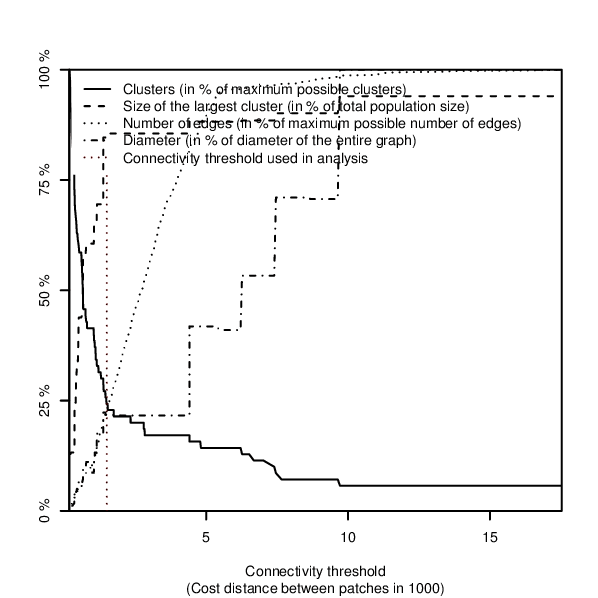
Figure: Overview plot over fragmentation of the network when edges of increasing length are removed, produced in the example below.
Edge measures
- Input parameters
- con_id = ID of the directed connection between two vertices (edge)
- con_id_u = ID of the undirected connection between two vertices (edge)
- from_p = Patch ID (patch_id) of the start-vertex of an (directed) edge
- from_pop = Population proxy (pop_proxy) of the start-vertex of an (directed) edge
- to_p = Patch ID (patch_id) of the end-vertex of an (directed) edge
- to_pop = Population proxy (pop_proxy) of the end-vertex of an (directed) edge
- Weights
- Cost distance (cd)
- Cost distance is calculated for the directed (cd) and undirected graph (cd_u). The cd weight for directed edges is exactly like measured in r.connectivity.distance, the cd weight for undirected edges is the average cost distance of the two directed edges between a pair of vertices (mean( a--b, b-a)). The cost distance weight does not take the user defined dispersal information (the population proxy for the different patches and the dispersal kernel) into account.
- Negative exponential decay kernel flow (distk)
- The negative exponential decay kernel is defined by the variables euler, base, and exponent specified by the user. It is calculated for the directed (distk) and undirected edges(distk_u) using the following formulas:
- distk = euler ^ ( ( basis * ( 10 ^ exponent ) )*( cd))
- distk_u = euler ^ ( ( basis * ( 10 ^ exponent ) )*( cd_u))
- Maximum potential flow (mf)
- For the maximum potential flow (mf) weight the user defined dispersal information (the population proxy and the dispersal kernel) is used to model the flow of propagules between a pair of vertices. This weight is based on the assumption that propagules disperse evenly and in full amount into all surrounding patches. Maximum potential flow is calculated using the following formula:
- mf = disk * pop_proxy
- Maximum potential flow is calculated for the directed graph as incoming (mf_i) and outgoing (mf_o) flow as well as for the undirected graph (mf_u). Unlike the cost distance weight, mf represents the "closeness" of a pair of vertices. For some (most) algorithms it had to be inverted in order to give meaningful results (mf_inv = Inverted maximum potential flow for directed edges, mf_inv_u = Inverted maximum potential flow for undirected edges).
- Competing potential flow (cf)
- The competing potential flow (cf) weight is based on the work by Ranius & Roberge 2011. Like in the maximum potential flow (mf) weight, the user defined dispersal information (the population proxy and the negative exponential decay kernel) is used to model the flow of propagules between a pair of vertices. But here it is assumed that the total amount of propagules is limited to the population proxy given by the user, and that this amount is distributed according to the "attractiveness" (defined by population size and cost distance) of the surrounding patches.
- Competing potential flow is calculated for the directed (cf) and undirected (cf_u)
graph. Unlike the cost distance weight, cf represents the "closeness" between a pair
of vertices. For some (most) algorithms it had to be inverted in order to give meaningful
results (cf_inv = Inverted competing potential flow for directed edges, cf_inv_u =
Inverted competing potential flow for undirected edges).
- The mf and cf weights are inverted (mf_inv, cf_inv) by multiplying them with -1
followed by linear normalising to the original maximum and minimum values.
- Output parameters
- Shortest connections (isshort)
- In r.connectivity.network all edges are classified if they represent the shortest path from the start- to the end-vertex, which is stored as a logical value (0 = FALSE or 1 = TRUE). Shortest connections are identified for every weight (isshort_cd, isshort_mf, isshort_cf). Finally the isshort attribute is set to 1 if an edge represents the shortest path for either the cd-weight, the mf-weight or the cf-weight (or 0 otherwise).
- Biconnected components (bc)
- If the removal of a single vertex and its adjacent edges does not disconnect the graph (increase the number of clusters) it is part of a biconnected component.
- Bridges (is_br)
- A bridge is an edge whose removal increases the number of clusters in a graph. Edges are classified either as bridge (1) or not (0).
- Edge betweenness (eb)
- The edge betweenness (eb) value represents the number of shortest paths that go through an edge, considering the shortest paths between all possible pairs of vertices. Edge betweenness is calculated with all three weights for the entire directed graph (cd_eb_u, mf_eb_u, cf_eb_u), the undirected graph with only direct edges (cd_eb_ud, mf_eb_ud, cf_eb_ud), and the undirected graph with only direct edges shorter than cost distance threshold (cd_eb_udc, mf_eb_udc, cf_eb_udc).
- Local edge betweenness (leb)
- The local edge betweenness (leb) value represents the number of shortest paths that go through an edge, considering the shortest paths between all possible pairs of vertices which are shorter than the user defined local neighbourhood (lnbh_threshold). Local edge betweenness is calculated with all three weights for the entire directed graph (cd_leb_u, mf_leb_u, cf_leb_u), the undirected graph with only direct edges (cd_leb_ud, mf_leb_ud, cf_leb_ud), and the undirected graph with only direct edges shorter than cost distance threshold (cd_leb_udc, mf_leb_udc, cf_leb_udc).
- Edge betweenness community (ebc)
- Some groups of vertices can be densely connected with each other but only little connected to other vertices. Such groups of relative intense connected vertices are communities. One algorithm to identify communities in a graph is edge betweenness community (ebc). Edge betweenness community is calculated in an iterative loop, where, first edge betweenness is calculated, then the edge with the largest edge betweenness value is removed, edge betweenness is recalculated and so on. The algorithm produces mainly two edge measures:
- 1. the order in which edges were deleted (ebc_r)
- 2. the edge betweenness value of an edge at the time of removal
- For large graphs calculating edge betweenness community can take a long time. Therefore, it is only calculated on request (y-flag) and only for one weight (cf). It is only calculated for the entire (undirected) graph.
- Minimum spanning trees (mst)
- A minimum spanning tree (mst) is a subgraph consisting of the minimal possible number of edges (= number of vertices - 1) connecting all vertices to a minimal possible number of clusters, while the sum of all edge weights is minimised. If the graph consists of more than one cluster, the result of the minimum spanning tree algorithm is a so-called minimum spanning forest, consisting of the minimum spanning tree for each cluster. In the context of nature conservation, the minimum spanning tree is sometimes referred to as the "backbone" of an area network (Bunn etal. 2000). In r.connectivity.network the minimum spanning tree/forest is calculated with all weights (cd, mf, cf) and for all undirected (sub)graphs (u, ud, udc) resulting in the following (logical) edge measures: cd_mst_u, cd_mst_ud, cd_mst_udc, mf_mst_u, mf_mst_ud, mf_mst_udc, cf_mst_u, cf_mst_ud, cf_mst_udc, where edges are either part of the minimum spanning tree/forest (1) or not (0).
- Potential cluster connectors (cl_pc_u)
- A cluster is a group of vertices which are connected with each other, but not with the rest of vertices in a graph (a single isolated vertex can be a cluster as well). Potential cluster connectors are edges which are longer than the connectivity threshold, and connect clusters in the subgraph with only edges shorter than the connectivity threshold.
- Potential community connectors (cf_ebc_pc, cf_iebc_pc)
- Potential community connectors are edges which connect communities identified by the edge betweenness community algorithm for a user defined community level.
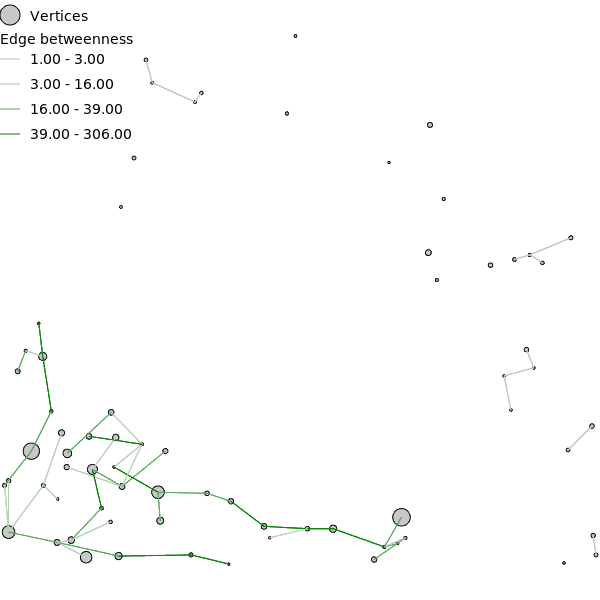
Figure: Edge betweenness of the network for all edges on the Minimum Spanning Tree (MST).
Vertex measures
- Input parameters
- Patch ID (patch_id)
- ID of the vertex = category value (cat) of the patch vector given by the user in r.connectivity.distance.
- Population proxy (pop_proxy)
- The population proxy given by the user in r.connectivity.distance.
- Output parameters
- Cluster membership (cl)
- A cluster is a group of vertices which are connected with each other,
but not with the rest of vertices in a graph (a single isolated vertex is a
cluster as well). The cluster membership value (integer) is the id of the
cluster a vertex belongs to.
- Community structure and membership (cf_(i)ebc_cs, cf_(i)ebc_cl)
- The edge betweenness community algorithm is used to analyse the community structure of a graph. It results in a hierarchical structure which describes how a graph is split up by the edge removal process into an increasing number of communities. The hierarchical community structure is stored as the (character) vertex attribute "cf_ebc_cs". The community membership value (integer) is the id of the community (identified by edge betweenness community) a vertex belongs to (on a user defined level of community division).
- Articulation points (art_p)
- Articulation points (art_p) are vertices whose removal would increase the number of clusters in a graph. Articulation points are identified for the entire directed graph (art_p_u), the undirected graph with only direct edges (art_p_ud), and the undirected graph with only direct edges shorter than the cost distance threshold (art_p_udc). Articulation points (art_p) are a (logical) measure of the graph structure and do not take edge weights into account. Vertices are either articulation points (1) or not (0).
- Articulation (art)
- The articulation value (integer) (art) is the number of new clusters which would occur when a vertex is removed. The articulation value (art) is a measure of the graph structure and does not take edge weights into account.
- Degree centrality (deg)
- Degree centrality of a vertex is defined as the number of vertices connected to this vertex. This (integer) measure is a measure of the graph structure and does not take edge weights into account. Degree centrality is calculated for all three undirected graphs (deg_u, deg_ud, deg_udc).
- Eigenvector centrality (evc)
- Eigenvector centrality (evc) in r.connectivity.network is a variation of the eigenvector centrality algorithm provided by the igraph library (see also: Csardi & Nepusz 2006). In r.connectivity.network eigenvector centrality is the sum of incoming potential flow of a vertex.
- Because eigenvector centrality takes the direction of potential flows into account it is calculated only for the directed graph and the directed graph with only edges shorter than connectivity threshold, using both cf and mf weight (cf_evc_u, cf_evc_uc, mf_evc_u, mf_evc_uc). Eigenvector centrality is stored with double precision.
- Closeness centrality (cl)
- Closeness centrality represents the number of steps which are necessary to access every other vertex from a given vertex. Closeness centrality (integer) is calculated with all three weights for the entire directed graph (cd_cl_u, mf_cl_u, cf_cl_u), the undirected graph with only direct edges (cd_cl_ud, mf_cl_ud, cf_cl_ud), and the undirected graph with only direct edges shorter than cost distance threshold (cd_cl_udc, mf_cl_udc, cf_cl_udc).
- Vertex betweenness (vb)
- The vertex betweenness (vb) value represents the number of shortest paths that go through a vertex (but that do not start or end in that vertex), considering the shortest paths between all possible pairs of vertices. Vertex betweenness is calculated with all three weights for the entire directed graph (cd_vb_u, mf_vb_u, cf_vb_u), the undirected graph with only direct edges (cd_vb_ud, mf_vb_ud, cf_vb_ud), and the undirected graph with only direct edges shorter than cost distance threshold (cd_vb_udc, mf_vb_udc, cf_vb_udc).
- Local vertex betweenness (lvb)
- The local vertex betweenness (lvb) value represents the number of shortest paths that go through a vertex (but that do not start or end in that vertex), considering the shortest paths between all possible pairs of vertices which are shorter than the user defined local neighbourhood (lnbh_threshold). Local vertex betweenness is calculated with all three weights for the entire directed graph (cd_vb_u, mf_vb_u, cf_vb_u), the undirected graph with only direct edges (cd_vb_ud, mf_vb_ud, cf_vb_ud), and the undirected graph with only direct edges shorter than cost distance threshold (cd_vb_udc, mf_vb_udc, cf_vb_udc).
- Neighbourhood size (nbh_s)
- The neighbourhood size (nbh_s) is the number of other vertices which can be reached from a vertex.
- Local neighbourhood size (nbh_sl)
- The local neighbourhood size (nbh_sl) is the number of other vertices which can be reached from a vertex along a path which is shorter than the user defined local neighbourhood.
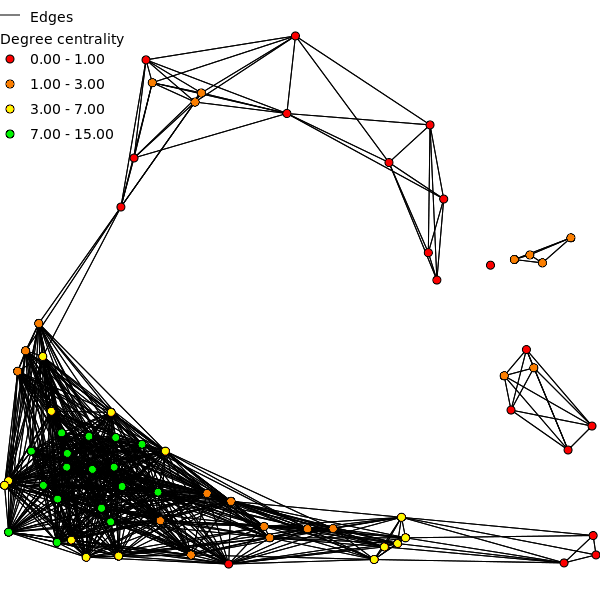
Figure: Degree centrality computed for the patches in the network.
REQUIREMENTS
For running this tool R language and environment for statistical computing and graphics has to be installed (see: http://www.r-project.org) together with the R-Python bridge rpy2. On Windows the path to R has to be added to the %path% variable in the environment settings (see: https://grass.osgeo.org/wiki/R_statistics#MS_Windows) and GRASS GIS has to be started after that.Furthermore the igraph package in R is required with version 1.0 or newer.
For parallel processing (at the moment only supported for Linux) the R packages doMC, multicore, iterators, codetools and foreach are required as well.
All R packages can be installed by running the AddOn using the i-flag (-i). Installation of R packages requires internet access.
For postscript output (overview and kernel plot) also ghostscript is required.
EXAMPLE
The following example is based on the North Carolina dataset and continued from the example in r.connectivity.distance.Analyse the network
(r.connectivity.network) In the next step network analysis is performed. We define the connectivity cutoff (maximum cost distance where connectivity is assumed) to be 1500.0 cost distance units, which represents the maximum known dispersal ability of our species. The dispersal kernel is adjusted to characteristics of this species by setting the exponent to -3, which gives a steeper decrease in successful dispersal with increasing cost distance. Only very few dispersal units of our species are expected to cross more than ca. 900 cost distance units successfully (see: ./hws_connectivity/kernel.eps after running the command or run it with the x-flag (-x) for only displaying the kernel).Connectivity metrics results are stored in the attribute table of the vector maps on vertex (patches, map name: "prefix" _ vertex_measures) and edge level (connections, map name: "prefix" _ edge_measures). An overview over connectivity metrics on the graph level (the entire network) is stored in "folder" (./hws_connectivity). We requested also an R-plot of the dispersal kernel and an R-plot giving an overview over network characteristics to be stored in the same folder.
Users with a multi-processor computer (e.g. dual-core) may speed up processing by setting cores > 1 in r.connectivity.network.
r.connectivity.network -i input=hws_connectivity_edges \ connectivity_cutoff=1500.0 lnbh_cutoff=2.0 cl_thres=10 exponent=-3 \ kernel_plot=./kernel.eps overview_plot=./overview.eps \ prefix=hws_connectivity cores=1
REFERENCE
- Bunn, A. G., Urban, D. L. & Keitt, T. H. 2000: Landscape connectivity: A conservation application of graph theory. Journal of Environmental Management (2000) 59: 265-278 http://www.sciencedirect.com/science/article/pii/S0301479700903736
- Calabrese, J. M. & Fagan, W. F. 2004: A comparison-shopper's guide to connectivity metrics. Front Ecol Environ 2 (10): 529-536 http://dx.doi.org/10.1890/1540-9295(2004)002[0529:ACGTCM]2.0.CO;2
- Minor, E. S. & Urban, D. L. 2008: A Graph-Theory Framework for Evaluating Landscape Connectivity and Conservation Planning. Conservation Biology 22 (2): 297-307 http://www.uic.edu/labs/minor/minor&urban2008.pdf
- Zetterberg, A., Mörtberg, U. M. & Balfors, B. 2010: Making graph theory operational for landscape ecological assessments, planning, and design. Landscape and Urban Planning (2010) 95: 181-191 http://www.sciencedirect.com/science/article/pii/S0169204610000204
- Ranius, T. & Roberge, J.-M. 2011: Effects of intensified forestry on the landscape-scale extinction risk of dead wood dependent species. Biodiversity and Conservation 20 (13): 2867-2882 http://www.springerlink.com/content/ch9qtv2665h624q4/
- Framstad, E., Blumentrath, S., Erikstad, L. & Bakkestuen, V. 2012 (in Norwegian): Naturfaglig evaluering av norske verneområder. Verneområdenes funksjon som økologisk nettverk og toleranse for klimaendringer. NINA Rapport 888: 126 pp. Norsk institutt for naturforskning (NINA), Trondheim. http://www.nina.no/archive/nina/PppBasePdf/rapport/2012/888.pdf
- Csardi G. & Nepusz T. 2006: The igraph software package for complex network research, InterJournal, Complex Systems 1695. 2006. http://igraph.sf.net
- Csardi, G. 2012: igraph: Network analysis and visualization. http://cran.r-project.org/web/packages/igraph/index.html
SEE ALSO
r.connectivity, r.connectivity.distance, r.connectivity.corridorsAUTHOR
Stefan Blumentrath, Norwegian Institute for Nature Research (NINA)SOURCE CODE
Available at: r.connectivity.network source code (history)
Latest change: Sunday Jan 02 15:06:26 2022 in commit: 1914519dd0698cfcfb7303cd0666e1fa62a32f92
Main index | Raster index | Topics index | Keywords index | Graphical index | Full index
© 2003-2023 GRASS Development Team, GRASS GIS 7.8.9dev Reference Manual