NAME
r.in.pdal - Creates a raster map from LAS LiDAR points using univariate statistics.KEYWORDS
raster, import, LIDAR, statistics, conversion, aggregation, binningSYNOPSIS
Flags:
- -w
- Reproject to location's coordinate system if needed
- Reprojects input dataset to the coordinate system of the GRASS location (by default only datasets with the matching cordinate system can be imported
- -e
- Use the extent of the input for the raster extent
- Set internally computational region extents based on the point cloud
- -n
- Set computation region to match the new raster map
- Set computation region to match the 2D extent and resolution of the newly created new raster map
- -o
- Override projection check (use current location's projection)
- Assume that the dataset has same projection as the current location
- -d
- Use base raster resolution instead of computational region
- For getting values from base raster, use its actual resolution instead of computational region resolution
- -p
- Print LAS file info and exit
- -g
- Print data file extent in shell script style and then exit
- --overwrite
- Allow output files to overwrite existing files
- --help
- Print usage summary
- --verbose
- Verbose module output
- --quiet
- Quiet module output
- --ui
- Force launching GUI dialog
Parameters:
- input=name
- LAS input file
- LiDAR input files in LAS format (*.las or *.laz)
- output=name
- Name for output raster map
- file=name
- File containing names of LAS input files
- LiDAR input files in LAS format (*.las or *.laz)
- method=string
- Statistic to use for raster values
- Options: n, min, max, range, sum, mean, stddev, variance, coeff_var, median, mode, percentile, skewness, trimmean, sidnmax, sidnmin, ev1, ev2, ev3
- Default: mean
- n: Number of points in cell
- min: Minimum value of point values in cell
- max: Maximum value of point values in cell
- range: Range of point values in cell
- sum: Sum of point values in cell
- mean: Mean (average) value of point values in cell
- stddev: Standard deviation of point values in cell
- variance: Variance of point values in cell
- coeff_var: Coefficient of variance of point values in cell
- median: Median value of point values in cell
- mode: Mode value of point values in cell
- percentile: pth (nth) percentile of point values in cell
- skewness: Skewness of point values in cell
- trimmean: Trimmed mean of point values in cell
- sidnmax: Maximum number of points in cell per source ID
- sidnmin: Minimum number of points in cell per source ID
- ev1: First eigenvalue of point x, y, z coordinates
- ev2: Second eigenvalue of point x, y, z coordinates
- ev3: Third eigenvalue of point x, y, z coordinates
- type=string
- Type of raster map to be created
- Storage type for resultant raster map
- Options: CELL, FCELL, DCELL
- Default: FCELL
- CELL: Integer
- FCELL: Single precision floating point
- DCELL: Double precision floating point
- base_raster=name
- Subtract raster values from the Z coordinates
- The scale for Z is applied beforehand, the range filter for Z afterwards
- zrange=min,max
- Filter range for Z data (min,max)
- Applied after base_raster transformation step
- zscale=float
- Scale to apply to Z data
- Default: 1.0
- irange=min,max
- Filter range for intensity values (min,max)
- iscale=float
- Scale to apply to intensity values
- Default: 1.0
- drange=min,max
- Filter range for output dimension values (min,max)
- dscale=float
- Scale to apply to output dimension values
- Use if output dimension is not Z or intensity
- input_srs=string
- Input dataset projection (WKT or EPSG, e.g. EPSG:4326)
- Override input dataset coordinate system using EPSG code or WKT definition
- pth=integer
- pth percentile of the values
- Options: 1-100
- trim=float
- Discard given percentage of the smallest and largest values
- Discard <trim> percent of the smallest and <trim> percent of the largest observations
- Options: 0-50
- resolution=float
- Output raster resolution
- return_filter=string
- Only import points of selected return type
- If not specified, all points are imported
- Options: first, last, mid
- class_filter=integer[,integer,...]
- Only import points of selected class(es)
- Input is comma separated integers. If not specified, all points are imported.
- dimension=string
- Dimension (variable) to use for raster values
- Options: z, intensity, number, returns, direction, angle, class, source
- Default: z
- z: Z coordinate
- intensity: Intensity
- number: Return number
- returns: Number of returns
- direction: Scan direction
- angle: Scan angle
- class: Point class value
- source: Source ID
- user_dimension=string
- Custom dimension (variable) to use for raster values
- PDAL dimension name
Table of contents
DESCRIPTION
The r.in.pdal module loads PDAL library supported point clouds (with emphasis on LiDAR LAS files) into a new raster map using binning. The user may choose from a variety of statistical methods which will be used for binning when creating the new raster.Since a new raster map is created during the binning, the binning of points depends on the current computational region settings (extent and resolution) by default (see more about binning below). When using the -e flag, the binning will be done in the extent of the point cloud, so the resulting raster will have extent based on the input point cloud. When the resolution=value parameter is used, the binning is done using the provided resolution and the resulting raster will have that resolution (see more below for more information about extent and resolution management).
r.in.pdal is designed for processing massive point cloud datasets, for example raw LiDAR or sidescan sonar swath data.
Binning
The main difference between r.in.pdal and v.in.pdal is that r.in.pdal creates a raster instead of just importing the points into GRASS GIS. However, r.in.pdal does not merely rasterizes the points from the point cloud. r.in.pdal uses binning to derive values for individual raster cells, so the value of a cell is typically an aggregation of values of individual points falling into one cell. In general binning is the conversion of points into a regular grid. The binning of points with X and Y coordinates starts with the overlay of a grid of bins over the points.In the basic case, binning is a method which counts the number of points which fall into one raster cell, i.e. bin. The number of points per cell (bin) indicates the density of points in the point cloud. The cell (bin) is always square or rectangular in case of r.in.pdal because the result is GRASS GIS 2D raster. The result of binning where the number of point per cell is counted is sometimes called 2D (two dimensional) histogram because a histogram is used in univariate statistics (in one dimension) to count the number samples falling into a given bin.
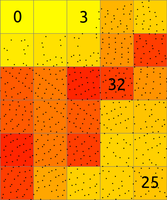
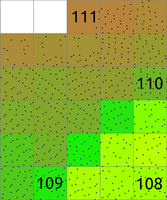
Figure: The binning on left was used to count number of points per (sometimes also called 2D histogram). The numbers in cells are examples of counts, the rest is represented by the color. The binning on right was used with mean to create a surface based on the values associated with the points. The numbers show examples of cell values. Note also the cells without any points which were assigned the NULL value.
Statistics
Available statistics for populating the output raster map are:- n
- This computes the number (count) of points per cell. The result is a indicator of spatially variable density of points in the given area.
- min
- This finds the minimum of point values in each cell. It can be useful when finding topography in a forested or urban environment and there is a lot of points per one cells (terrain is oversampled considering the desired resolution). It can also create surfaces independent on the noise from premature hits as it will always select the lowest point.
- max
- This finds the maximum of point values in each cell. In connection with base_raster it can yield maximum vegetation of feature height per cell. For this purpose, it is usually much more appropriate than mean which would yield heights mostly influenced by the vertical distribution of points.
- range
- This computes the range of point values in each cell. The range of Z coordinates per cell can be used as a rough estimate of vegetation height when the cells are small enough, slopes low and the area is mostly vegetated. However, for more profound analysis, the base raster together with different statistics is recommended.
- sum
- This computes the sum of point values per cell. This is useful especially when intensity is used as a value.
- mean
- This is a mean (average) value of point values in cell. When used with Z coordinates (the default) and points from the ground class, the resulting raster is a digital elevation model. When intensity is used as a point value, the resulting raster contains mean intensity per cell. Note that mean gives heights influenced by the vertical distribution of points.
- stddev
- This computes the standard deviation of point values for each cell.
- variance
- This computes the variance of point values for each cell. Variance and derivatives use the biased estimator (n). It is calculated by Welford algorithm.
- coeff_var
- This computes the coefficient of variance of point values for each cell. Coefficient of variance is given in percentage and defined as 100 * sqrt(variance) / mean.
- median
- This computes the median of point values for each cell
- mode
- This computes the mode (the most common value) of point values for each cell. If there are more than one mode for a cell, an arbitrary one will be selected.
- percentile
- pth (nth) percentile of points in cell
- skewness
- This is a skewness of point values in cell
- trimmean
- This is a trimmed mean of point values in cell. Trimmed mean also know as truncated mean is a mean computed after discarding values at the low end and at the high end. How many values to discard is given by the trim option in percent. In statistics the usual percentage of trimmed values ranges from 5 to 25 percent.
- sidnmax
- Maximum number of points in cell per source ID. Points are counted for each source separately and largest count is used as the final cell value. Corresponds to majority density (Dmax) as defined by Smeeckaert et al., 2013.
- sidnmin
- Minimum number of points in cell per source ID. Points are counted for each source separately and smallest count is used as the final cell value. Corresponds to minority density (Dmin) as defined by Smeeckaert et al., 2013.
- ev1, ev2, ev3
- 1st, 2nd and 3rd eigenvalue of point x, y and z coordinates within a cell (Mallet et al. 2011).
In varied terrain the user may find that min maps make for a good noise filter as most LIDAR noise is from premature hits. The min map may also be useful to find the underlying topography in a forested or urban environment if the cells are oversampled.
Filtering and selection
Points are always filtered by spatial extent (based on current computational region) unless -e flag is set. Afterwards import value scaling is performed, followed by filtering by having value in range.Points falling outside the current computational region will be skipped. This includes points falling exactly on the southern or eastern region bound. To capture those adjust the region with:
g.region s=s-0.000001
The zrange parameter may be used for filtering the input data by vertical extent. Example uses include filtering out extreme outliers and outliers on relatively flat terrain. This parameter can be also used for cutting the point cloud into vertical sections preparing it for further processing by separate sections, together as if it would be an imagery group (see i.group), or combined into a 3D raster using r.to.rast3. In for these last examples, it might actually be more advantageous to use r3.in.lidar module. The zrange parameter is especially powerful when used together with the base_raster parameter. The zrange is applied to Z values after the base_raster reduction.
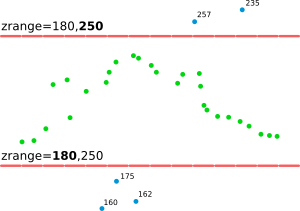
Figure: This is the principle of zrange filter. Points with the Z coordinate value below the lower value in the range (here 180) are filtered out (blue points) and same applies for points above higher value in the range (here 250). All other points are preserved (green points).
Filtering can be performed also on intensity values with irange parameter. If imported dimension is neither Z nor intensity, filtering can be performed with drange parameter. Filtering by Z values and intensity can be performed independently on imported dimension. If imported dimension is not Z nor intensity, filtering can be performed with all three parameters simultaneously (zrange, irange and drange) or any of their combination.
A LiDAR pulse can have multiple returns. The first return values can be used to obtain a digital surface model (DSM) where e.g. canopy cover is represented. The last return values can be used to obtain a digital terrain model (DTM) where e.g. the forest floor instead of canopy cover is represented. The return_filter option allows selecting one of first, mid, or last returns. Return number and number of returns in the pulse associated with each point are compared to determine if the point is first, mid, or last return.
LiDAR points often come as already classified into standardized classes. For example, class number 2 represents ground. For other classes see LAS format specification in references. The class_filter option allows selecting one or more classes using numbers (integers) separated by comma.
The user can use a combination of r.in.pdal output maps to create custom raster-based filters, for examplee, use r.mapcalc to create a mean-(2*stddev) map. (In this example the user may want to include a lower bound filter in r.mapcalc to remove highly variable points (small n) or run r.neighbors to smooth the stddev map before further use.)
Note that proper filtering of the input points in not only critical for the analysis itself but it can also speed up the processing.
LiDAR points can contain a lot of attributes besides their coordinates. By default r.in.pdal will use point Z coordinate as the output raster value source. The dimension option allows using different point attributes as an output instead of Z value. In case if other than Z value is chosen, output map type will be set to CELL. Explanation of various attributes can be found in LAS Specification chapter "Point Data Records". Be ware - not all attributes might be present and also their value ranges and meaning might vary between LAS file producers.
PDAL supports creation of custom dimensions (point attributes) in LAS files. Use user_dimension option to provide name of any dimension for import. This option supersedes one specified by dimension option.
Reduction to a base raster
For analysis of features on the terrain surface, especially vegetation it is advantageous to remove the influence of the terrain on heights because the height above the terrain is important (e.g. height of a tree) rather than height of the top of the tree above the see level. In this case, the base raster would be digital elevation model which can be one derived from the point cloud, or obtained in some other way. LiDAR data often come with precomputed DEMs (quality should be checked in this case) and there is often a DEM available for a given area (fit with the point cloud, especially vertical, and resolution should be checked).
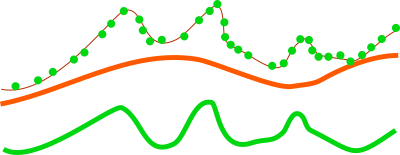
Figure: This is a profile of base raster (in orange) representing digital elevation model and selected points, e.g. first return, from point cloud (green dots). By default the points would create a digital surface model (thin brown line) but after reducing the Z coordinates using the base raster, the created surface is a derived from the height of points relative to the base raster.
Setting extent and resolution
Since the creation of raster maps depends on the computational region settings (extent and resolution), as default the current region extents and resolution are used for the import. When using the -e flag along with the resolution=value parameter, the region used for the new raster will be based the point cloud extent and the provided resolution. It is therefore recommended to first use the -s flag to get the extents of the LiDAR point cloud to be imported, then adjust the current region extent and resolution accordingly, and only then proceed with the actual import. Another option is to automatically set the region extents based on the LAS dataset itself (-e flag) along with the desired raster resolution. The best option is to know the point cloud extent ahead, e.g. from tiling scheme, and use it. See below for details.
Since the r.in.pdal generates a raster map through binning from the original LiDAR points, the target computational region extent and resolution have to be determined. A typical workflow would involve the examination of the LAS data's associated documentation or the scan of the LAS data file with r.in.pdal's -g flag to find the input data's bounds.
Another option is to automatically set the region extents based on the LAS dataset extent (-e flag) along with the desired raster resolution using the resolution parameter.
The -g flag prints extent of input data set(s) in a shell style suitable as command line parameters for g.region. Note, extent is determined from data set(s) metadata and without scanning whole dataset and thus selectros and filters are not applied.
A simpler option is to automatically set the region extents based on the LAS dataset (-e flag) along with the target raster resolution using the resolution parameter. Also here it is recommended to verify and optimize the resulting region settings with g.region prior to importing the dataset.
Transformation
Point Z axis values can be altered by scaling parameter set by zscale. Each point X axis value is multiplied by provided value before any filtering or further transformation takes place. In the same way act iscale and dscale parameters - values are multiplied before range filters irange or drnage are applied (if present).
Output value scaling can be performed independently of filtering by providing dscale parameter. This scaling parameter is applied only to output value independently of its dimension. Thus if zrange and dscale are set for Z output dimension, filtering by zrange will be done with unscaled values but output will be scaled by dscale. dscale takes precedence over zscale and iscale if more than one parameter is provided.
NOTES
Format and projection support
The typical file extensions for the LAS format are .las and .laz (compressed). The compressed LAS (.laz) format can be imported only if libLAS has been compiled with LASzip support. It is also recommended to compile libLAS with GDAL which is used to test if the LAS projection matches that of the GRASS location.Memory consumption
While the input file can be arbitrarily large, r.in.pdal will use a large amount of system memory (RAM) for large raster regions (> 10000x10000 pixels). If the module refuses to start complaining that there isn't enough memory, use the percent parameter to run the module in several passes. In addition using a less precise map format (CELL [integer] or FCELL [floating point]) will use less memory than a DCELL [double precision floating point] output map. For methods=n, mode, sidnmin, sidnmax, the CELL format is used automatically.
The mean and range methods will use average amount of memory (comparing to other methods). Methods such as n, min, max, and sum will use less memory, while stddev, variance, and coeff_var will use more.
The memory usage for regular statistics mentioned above is based solely on region (raster) size. However, the aggregate functions median, mode, percentile, skewness and trimmean will use more memory and may not be appropriate for use with arbitrarily large input files without a small value for the percent option because unlike the other statistics memory use for these also depends on the number of data points.
The default map type=FCELL is intended as compromise between preserving data precision and limiting system resource consumption.
Trim option
Trim option value is used only when calculating trimmed mean values. Attempt to use it with other statistical methods will result in an error.
Print flag
The -p flag will use PDAL library built-in LAS file metadata printing function. It will also include a list of supported dimension names. Any of listed dimensions can be passed to the user_dimension option. Dimensions are not checked for presence of data for any of points in the file and thus importing a dimension without actual data will result in an empty map.
EXAMPLES
Simple example of binning of point from a LAS file into a newly created raster map in an existing location/mapset (using metric units):# set the computational region automatically, resol. for binning is 5m r.in.pdal -e -o input=points.las resolution=5 output=lidar_dem_mean g.region raster=lidar_dem_mean -p r.univar lidar_dem_mean
Finding suitable extent and resolution
For the output raster map, a suitable resolution can be found by dividing the number of input points by the area covered (this requires an iterative approach as outlined here):
# print LAS metadata (Number of Points)
r.in.pdal -p input=points.las
# Point count: 1287775
# scan for LAS points cloud extent
r.in.pdal -g input=points.las output=dummy -o
# n=2193507.740000 s=2190053.450000 e=6070237.920000 w=6066629.860000 b=-3.600000 t=906.000000
# set computation region to this extent
g.region n=2193507.740000 s=2190053.450000 e=6070237.920000 w=6066629.860000 -p
# print resulting extent
g.region -p
# rows: 3454
# cols: 3608
# points_per_cell = n_points / (rows * cols)
# Here: 1287775 / (3454 * 3608) = 0.1033359 LiDAR points/raster cell
# As this is too low, we need to select a lower raster resolution
g.region res=5 -ap
# rows: 692
# cols: 723
# Now: 1287775 / (692 * 723) = 2.573923 LiDAR points/raster cell
# import as mean
r.in.pdal input=points.las output=lidar_dem_mean method=mean -o
# import as max
r.in.pdal input=points.las output=lidar_dem_max method=max -o
# import as p'th percentile of the values
r.in.pdal input=points.las output=lidar_dem_percentile_95 \
method=percentile pth=95 -o
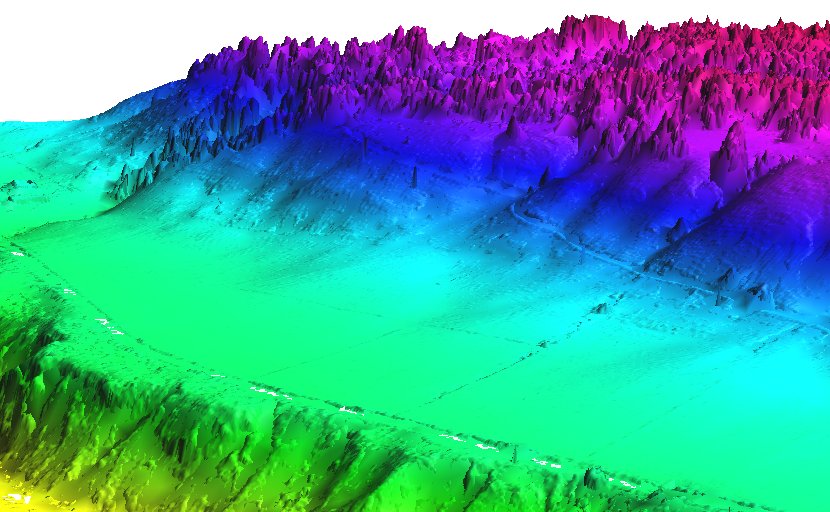
Mean value DEM in perspective view, imported from LAS file
Further hints: how to calculate number of LiDAR points/square meter:
g.region -e # Metric location: # points_per_sq_m = n_points / (ns_extent * ew_extent) # Lat/Lon location: # points_per_sq_m = n_points / (ns_extent * ew_extent*cos(lat) * (1852*60)^2)
Serpent Mound dataset
This example is analogous to the example used in the GRASS wiki page for importing LAS as raster DEM.The sample LAS data are in the file "Serpent Mound Model LAS Data.las", available at appliedimagery.com:
# print LAS file info
r.in.pdal -p input="Serpent Mound Model LAS Data.las"
# using v.in.lidar to create a new location
# create location with projection information of the LAS data
v.in.lidar -i input="Serpent Mound Model LAS Data.las" location=Serpent_Mound
# quit and restart GRASS in the newly created location "Serpent_Mound"
# scan the extents of the LAS data
r.in.pdal -g input="Serpent Mound Model LAS Data.las"
# set the region to the extents of the LAS data, align to resolution
g.region n=4323641.57 s=4320942.61 w=289020.90 e=290106.02 res=1 -ap
# import as raster DEM
r.in.pdal input="Serpent Mound Model LAS Data.las" \
output=Serpent_Mound_Model_LAS_Data method=mean
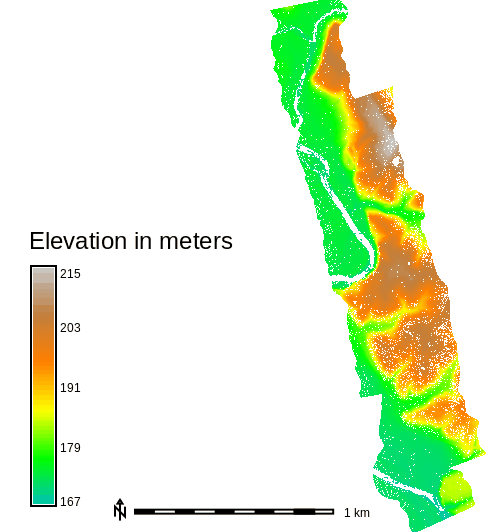
Figure: Elevation for the whole area of Serpent Mound dataset
Height above ground
The mean height above ground of the points can be computed for each raster cell (the ground elevation is given by the raster map elevation):g.region raster=elevation -p r.in.pdal input=points.las output=mean_height_above_ground base_raster=elevation method=mean
Multiple file input
The file option requres a file that contains a list of file names with the full path. For example, a list of files in the directory /home/user/data:points1.laz points2.laz points3.laz
/home/user/data/points1.laz /home/user/data/points2.laz /home/user/data/points3.laz
ls /home/user/data/*.laz > /home/user/data/filelist.txt
dir /b c:\users\user\data\*.laz > c:\users\user\data\filelist.txt
g.region raster=elevation -p r.in.pdal file=/home/user/data/filelist.txt output=mean_height_above_ground base_raster=elevation method=mean
import glob
import gscript
file_list_name = '/home/user/data/filelist.txt'
with open(, mode='w') as file_list:
for path in glob.iglob('/home/user/data/lidar/*.las'):
file_list.write(path + "\n")
gscript.run_command('r.in.pdal', file=file_list_name,
output='mean_height_above_ground',
base_raster='elevation' method='mean')
KNOWN ISSUES
- Only one method can be applied for a single run and multiple map output from a single run (e.g. method=string[,string,...] output=name[,name,...] or n=string mean=string) is no supported.
SEE ALSO
g.region, r.in.xyz, r.mapcalc, r.univar, v.in.lidar, r3.in.lidar, v.vect.statsv.lidar.correction, v.lidar.edgedetection, v.lidar.growing, v.outlier, v.surf.bspline
Trimmed mean (Truncated mean, Wikipedia article), OpenTopography (LiDAR point cloud repository)
REFERENCES
- V. Petras, A. Petrasova, J. Jeziorska, H. Mitasova (2016): Processing UAV and lidar point clouds in GRASS GIS. XXIII ISPRS Congress 2016 [ISPRS Archives, ResearchGate]
- ASPRS LAS format
- PDAL - Point Data Abstraction Library
AUTHORS
Markus MetzVaclav Petras, NCSU GeoForAll Lab (base_raster option, documentation),
Maris Nartiss, LU GZZF (refactoring, additional filters, custom dimension support)
based on r.in.xyz by Hamish Bowman and Volker Wichmann
SOURCE CODE
Available at: r.in.pdal source code (history)
Latest change: Thu Mar 24 20:47:52 2022 in commit: dc57aa34a77eb846a8675fc323b75dc7d3119fa1
Main index | Raster index | Topics index | Keywords index | Graphical index | Full index
© 2003-2022 GRASS Development Team, GRASS GIS 8.0.3dev Reference Manual