NAME
r.futures.pga - Simulates landuse change using FUTure Urban-Regional Environment Simulation (FUTURES).Module uses Patch-Growing Algorithm (PGA) to simulate urban-rural landscape structure development.
KEYWORDS
raster, patch growing, urban, landscape, modelingSYNOPSIS
Flags:
- -s
- Generate random seed (result is non-deterministic)
- Automatically generates random seed for random number generator (use when you don't want to provide the seed option)
- --overwrite
- Allow output files to overwrite existing files
- --help
- Print usage summary
- --verbose
- Verbose module output
- --quiet
- Quiet module output
- --ui
- Force launching GUI dialog
Parameters:
- developed=name [required]
- Raster map of developed areas (=1), undeveloped (=0) and excluded (no data)
- subregions=name [required]
- Raster map of subregions
- output=name [required]
- State of the development at the end of simulation
- output_series=basename
- Basename for raster maps of development generated after each step
- Name for output basename raster map(s)
- num_steps=integer
- Number of steps to be simulated
- predictors=name[,name,...] [required]
- Names of predictor variable raster maps
- Listed in the same order as in the development potential table
- devpot_params=name [required]
- Development potential parameters for each region
- Each line should contain region ID followed by parameters (intercepts, development pressure, other predictors). Values are separated by tabs. First line is ignored, so it can be used for header
- development_pressure=name [required]
- Raster map of development pressure
- n_dev_neighbourhood=integer [required]
- Size of square used to recalculate development pressure
- development_pressure_approach=string [required]
- Approaches to derive development pressure
- Options: occurrence, gravity, kernel
- Default: gravity
- gamma=float [required]
- Influence of distance between neighboring cells
- scaling_factor=float [required]
- Scaling factor of development pressure
- demand=name [required]
- Control file with number of cells to convert
- discount_factor=float [required]
- Discount factor of patch size
- compactness_mean=float [required]
- Mean value of patch compactness to control patch shapes
- compactness_range=float [required]
- Range of patch compactness to control patch shapes
- num_neighbors=integer [required]
- The number of neighbors to be used for patch generation (4 or 8)
- Options: 4, 8
- Default: 4
- seed_search=integer [required]
- The way location of a seed is determined (1: uniform distribution 2: development probability)
- Options: 1, 2
- Default: 2
- patch_sizes=name [required]
- File containing list of patch sizes to use
- incentive_power=float
- Exponent to transform probability values p to p^x to simulate infill vs. sprawl
- Values > 1 encourage infill, < 1 urban sprawl
- Options: 0-10
- Default: 1
- constrain_weight=name
- Raster map representing development potential constraint weight for scenarios.
- Values must be between 0 and 1, 1 means no constraint.
- stimulus=name
- Raster map representing an increase in development potential for scenarios.
- Values must be between 0 and 1, 0 means no increase.
- random_seed=integer
- Seed for random number generator
- The same seed can be used to obtain same results or random seed can be generated by other means.
Table of contents
DESCRIPTION
Module r.futures.pga is part of FUTURES land change model. This module uses stochastic Patch-Growing Algorithm (PGA) and a combination of field-based and object-based representations to simulate land changes. PGA simulates undeveloped to developed land change by iterative site selection and a contextually aware region growing mechanism. Simulations of change at each time step feed development pressure back to the POTENTIAL submodel, influencing site suitability for the next step.Patch growing
Patches are constructed in three steps. First, a potential seed is randomly selected from available cells. In case seed_search is 2, the probability value (based on POTENTIAL) of the seed is tested using Monte Carlo approach, and if it doesn't survive, new potential seed is selected and tested. Second, using a 4- or 8-neighbor (see num_neighbors) search rule PGA grows the patch. PGA decides on the suitability of contiguous cells based on their underlying development potential and distance to the seed adjusted by compactness parameter given in compactness_mean and compactness_range. The size of the patch is determined by randomly selecting a patch size from patch sizes file and multiplied by discount_factor. To find optimal values for patch sizes and compactness, use module r.futures.calib. Once a cell is converted, it remains developed. PGA continues to grow patches until the per capita land demand is satisfied.Development pressure
Development pressure is a dynamic spatial variable derived from the patch-building process of PGA and associated with the POTENTIAL submodel. At each time step, PGA updates the POTENTIAL probability surface based on land change, and the new development pressure then affects future land change. The initial development pressure is computed using module r.futures.devpressure. The same input parameters of this module (gamma, scaling factor and n_dev_neighbourhood) are then used as input for r.futures.pga.Scenarios
Scenarios involving policies that encourage infill versus sprawl can be explored using the incentive_power parameter, which uses a power function to transform the probability in POTENTIAL.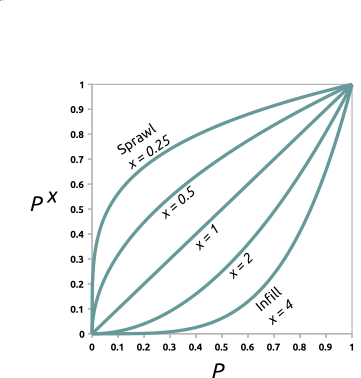
Figure: Transforming development potential surface using incentive tables with different power functions.
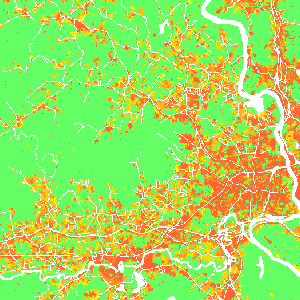
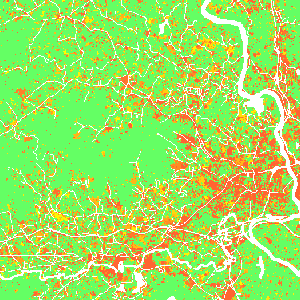
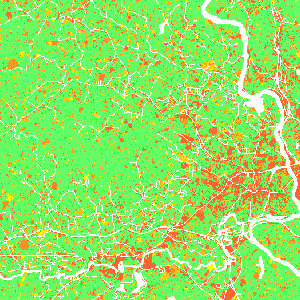
Figure: Effect of incentive table on development probability: infill (left), status quo (middle), sprawl (right) scenario.
Additionally, parameter constrain_weight (raster map from 0 to 1) enables to include policies (such as new regulations or fees) which limit the development in certain areas. The probability surface is simply multiplied by the constrain_weight values, which results in decreased site suitability in areas, where the constrain_weight values are lower than 1.
Similarly, parameter stimulus (raster map from 0 to 1) enables to include policies to encourage growth in an area. Using this option results in increased site suitability in areas, where the stimulus values are greater than 0. The probability surface is transformed from initial probability p with stimulus s to p + s - p * s.
Output
After the simulation ends, raster specified in parameter output is written. If optional parameter output_series is specified, additional output is a series of raster maps for each step. Cells with value 0 represents the initial development, values >= 1 then represent the step in which the cell was developed. Undeveloped cells have value -1.
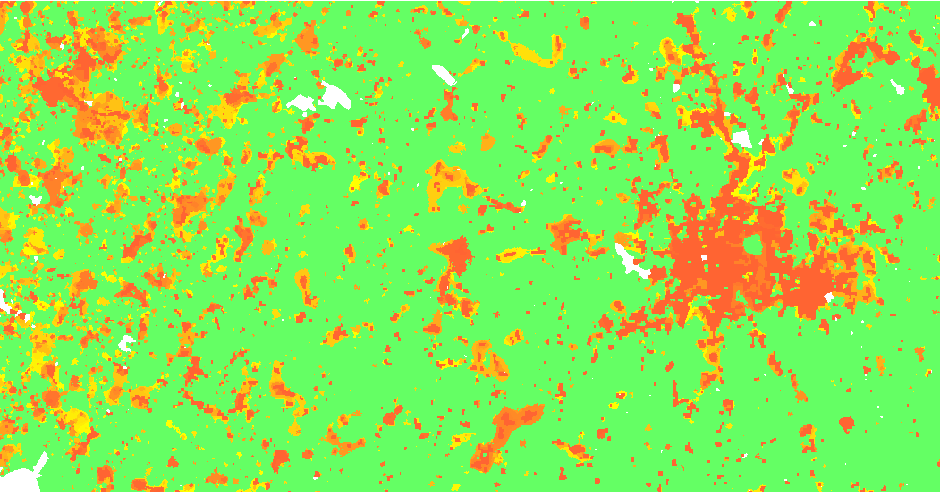
Figure: Output map of developed areas
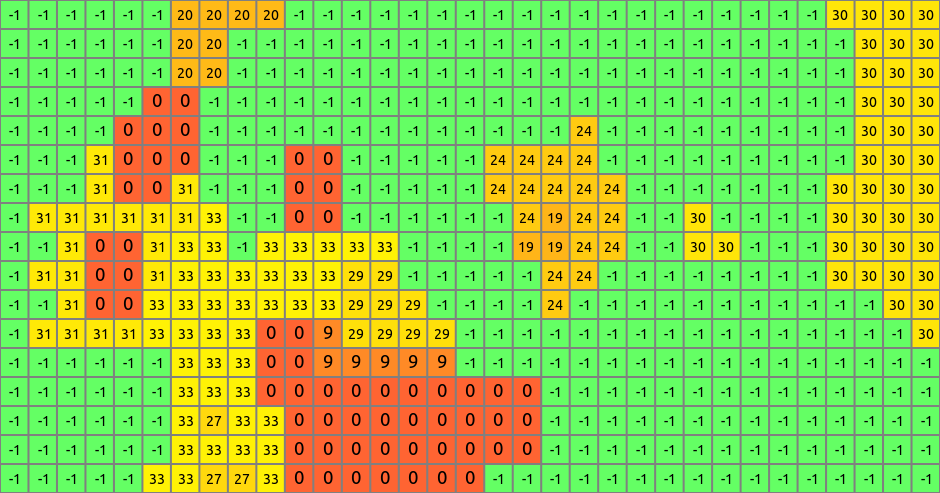
Figure: Detail of output map
EXAMPLE
r.futures.pga -s developed=lc96 predictors=d2urbkm,d2intkm,d2rdskm,slope \ demand=demand.txt devpot_params=devpotParams.csv discount_factor=0.6 \ compactness_mean=0.4 compactness_range=0.08 num_neighbors=4 seed_search=2 \ patch_sizes=patch_sizes.txt development_pressure=gdp n_dev_neighbourhood=10 \ development_pressure_approach=gravity gamma=2 scaling_factor=1 \ subregions=subregions incentive_power=2 \ constrain_weight=weight_1 output=final_results output_series=development
KNOWN ISSUES
Module holds all data in the memory, so for large areas the memory requirements are high. Some inputs are not yet documented.REFERENCES
- Meentemeyer, R. K., Tang, W., Dorning, M. A., Vogler, J. B., Cunniffe, N. J., & Shoemaker, D. A. (2013). FUTURES: Multilevel Simulations of Emerging Urban-Rural Landscape Structure Using a Stochastic Patch-Growing Algorithm. Annals of the Association of American Geographers, 103(4), 785-807.
- Dorning, M. A., Koch, J., Shoemaker, D. A., & Meentemeyer, R. K. (2015). Simulating urbanization scenarios reveals tradeoffs between conservation planning strategies. Landscape and Urban Planning, 136, 28-39.
SEE ALSO
FUTURES, r.futures.devpressure, r.futures.calib, r.futures.demand, r.futures.potential, r.futures.parallelpga, r.sample.categoryAUTHORS
Corresponding author:
Ross K. Meentemeyer, rkmeente ncsu edu,
Center for Geospatial Analytics, NCSU
Original standalone version:
Ross K. Meentemeyer *
Wenwu Tang *
Monica A. Dorning *
John B. Vogler *
Nik J. Cunniffe *
Douglas A. Shoemaker *
Jennifer A. Koch **
* Department of Geography and Earth Sciences, UNC Charlotte
** Center for Geospatial Analytics, NCSU
Port to GRASS GIS and GRASS-specific additions:
Vaclav Petras, NCSU OSGeoREL
Last changed: $Date: 2016-03-22 02:22:47 +0100 (Tue, 22 Mar 2016) $
SOURCE CODE
Available at: r.futures.pga source code (history)
Main index | Raster index | Topics index | Keywords index | Graphical index | Full index
© 2003-2018 GRASS Development Team, GRASS GIS 7.4.1svn Reference Manual