i.cluster
Generates spectral signatures for land cover types in an image using a clustering algorithm.
The resulting signature file is used as input for i.maxlik, to generate an unsupervised image classification.
i.cluster group=name subgroup=name signaturefile=name classes=integer [seed=name] [sample=rows,cols] [iterations=integer] [convergence=float] [separation=float] [min_size=integer] [reportfile=name] [--overwrite] [--verbose] [--quiet] [--qq] [--ui]
Example:
i.cluster group=name subgroup=name signaturefile=name classes=0
grass.tools.Tools.i_cluster(group, subgroup, signaturefile, classes, seed=None, sample=None, iterations=30, convergence=98.0, separation=0.0, min_size=17, reportfile=None, overwrite=None, verbose=None, quiet=None, superquiet=None)
Example:
tools = Tools()
tools.i_cluster(group="name", subgroup="name", signaturefile="name", classes=0)
This grass.tools API is experimental in version 8.5 and expected to be stable in version 8.6.
grass.script.run_command("i.cluster", group, subgroup, signaturefile, classes, seed=None, sample=None, iterations=30, convergence=98.0, separation=0.0, min_size=17, reportfile=None, overwrite=None, verbose=None, quiet=None, superquiet=None)
Example:
gs.run_command("i.cluster", group="name", subgroup="name", signaturefile="name", classes=0)
Parameters
group=name [required]
Name of input imagery group
subgroup=name [required]
Name of input imagery subgroup
signaturefile=name [required]
Name for output file containing result signatures
classes=integer [required]
Initial number of classes
Allowed values: 1-255
seed=name
Name of file containing initial signatures
sample=rows,cols
Number of rows and columns over which a sample pixel is taken
iterations=integer
Maximum number of iterations
Default: 30
convergence=float
Percent convergence
Allowed values: 0-100
Default: 98.0
separation=float
Cluster separation
Default: 0.0
min_size=integer
Minimum number of pixels in a class
Default: 17
reportfile=name
Name for output file containing final report
--overwrite
Allow output files to overwrite existing files
--help
Print usage summary
--verbose
Verbose module output
--quiet
Quiet module output
--qq
Very quiet module output
--ui
Force launching GUI dialog
group : str, required
Name of input imagery group
Used as: input, group, name
subgroup : str, required
Name of input imagery subgroup
Used as: input, subgroup, name
signaturefile : str, required
Name for output file containing result signatures
Used as: output, sigfile, name
classes : int, required
Initial number of classes
Allowed values: 1-255
seed : str, optional
Name of file containing initial signatures
Used as: input, sigfile, name
sample : tuple[int, int] | list[int] | str, optional
Number of rows and columns over which a sample pixel is taken
Used as: rows,cols
iterations : int, optional
Maximum number of iterations
Default: 30
convergence : float, optional
Percent convergence
Allowed values: 0-100
Default: 98.0
separation : float, optional
Cluster separation
Default: 0.0
min_size : int, optional
Minimum number of pixels in a class
Default: 17
reportfile : str, optional
Name for output file containing final report
Used as: output, file, name
overwrite : bool, optional
Allow output files to overwrite existing files
Default: None
verbose : bool, optional
Verbose module output
Default: None
quiet : bool, optional
Quiet module output
Default: None
superquiet : bool, optional
Very quiet module output
Default: None
Returns:
result : grass.tools.support.ToolResult | None
If the tool produces text as standard output, a ToolResult object will be returned. Otherwise, None will be returned.
Raises:
grass.tools.ToolError: When the tool ended with an error.
group : str, required
Name of input imagery group
Used as: input, group, name
subgroup : str, required
Name of input imagery subgroup
Used as: input, subgroup, name
signaturefile : str, required
Name for output file containing result signatures
Used as: output, sigfile, name
classes : int, required
Initial number of classes
Allowed values: 1-255
seed : str, optional
Name of file containing initial signatures
Used as: input, sigfile, name
sample : tuple[int, int] | list[int] | str, optional
Number of rows and columns over which a sample pixel is taken
Used as: rows,cols
iterations : int, optional
Maximum number of iterations
Default: 30
convergence : float, optional
Percent convergence
Allowed values: 0-100
Default: 98.0
separation : float, optional
Cluster separation
Default: 0.0
min_size : int, optional
Minimum number of pixels in a class
Default: 17
reportfile : str, optional
Name for output file containing final report
Used as: output, file, name
overwrite : bool, optional
Allow output files to overwrite existing files
Default: None
verbose : bool, optional
Verbose module output
Default: None
quiet : bool, optional
Quiet module output
Default: None
superquiet : bool, optional
Very quiet module output
Default: None
DESCRIPTION
i.cluster performs the first pass in the two-pass unsupervised classification of imagery, while the GRASS module i.maxlik executes the second pass. Both commands must be run to complete the unsupervised classification.
i.cluster is a clustering algorithm (a modification of the k-means clustering algorithm) that reads through the (raster) imagery data and builds pixel clusters based on the spectral reflectances of the pixels (see Figure). The pixel clusters are imagery categories that can be related to land cover types on the ground. The spectral distributions of the clusters (e.g., land cover spectral signatures) are influenced by six parameters set by the user. A relevant parameter set by the user is the initial number of clusters to be discriminated.
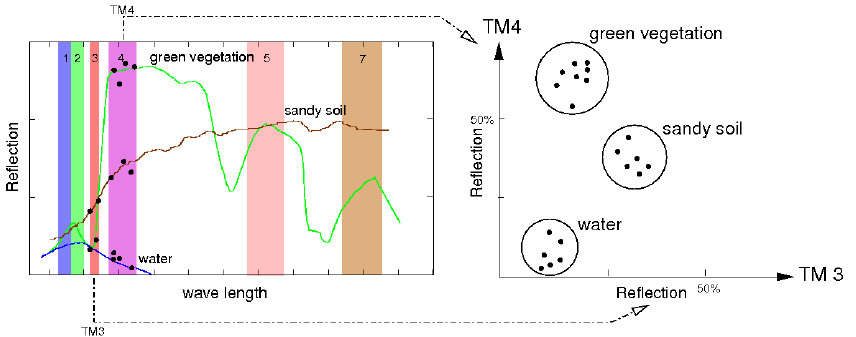
Fig.: Land use/land cover clustering of LANDSAT scene (simplified)
i.cluster starts by generating spectral signatures for this number of clusters and "attempts" to end up with this number of clusters during the clustering process. The resulting number of clusters and their spectral distributions, however, are also influenced by the range of the spectral values (category values) in the image files and the other parameters set by the user. These parameters are: the minimum cluster size, minimum cluster separation, the percent convergence, the maximum number of iterations, and the row and column sampling intervals.
The cluster spectral signatures that result are composed of cluster means and covariance matrices. These cluster means and covariance matrices are used in the second pass (i.maxlik) to classify the image. The clusters or spectral classes result can be related to land cover types on the ground. The user has to specify the name of group file, the name of subgroup file, the name of a file to contain result signatures, the initial number of clusters to be discriminated, and optionally other parameters (see below) where the group should contain the imagery files that the user wishes to classify. The subgroup is a subset of this group. The user must create a group and subgroup by running the GRASS program i.group before running i.cluster. The subgroup should contain only the imagery band files that the user wishes to classify. Note that this subgroup must contain more than one band file. The purpose of the group and subgroup is to collect map layers for classification or analysis. The signaturefile is the file to contain result signatures which can be used as input for i.maxlik. The classes value is the initial number of clusters to be discriminated; any parameter values left unspecified are set to their default values.
For all raster maps used to generate signature file it is recommended to have semantic label set. Use r.support to set semantc labels of each member of the imagery group. Signatures generated for one scene are suitable for classification of other scenes as long as they consist of same raster bands (semantic labels match). If semantic labels are not set, it will be possible to use obtained signature file to classify only the same imagery group used for generating signatures.
Parameters
group: The name of the group file which contains the imagery files that the user wishes to classify.
subgroup: The name of the subset of the group specified in group option, which must contain only imagery band files and more than one band file. The user must create a group and a subgroup by running the GRASS program i.group before running i.cluster.
signaturefile: The name assigned to output signature file which contains signatures of classes and can be used as the input file for the GRASS program i.maxlik for an unsupervised classification.
classes: The number of clusters that will initially be identified in the clustering process before the iterations begin.
seed: The name of a seed signature file is optional. The seed signatures are signatures that contain cluster means and covariance matrices which were calculated prior to the current run of i.cluster. They may be acquired from a previously run of i.cluster or from a supervised classification signature training site section (e.g., using the signature file output by g.gui.iclass). The purpose of seed signatures is to optimize the cluster decision boundaries (means) for the number of clusters specified.
sample: These numbers are optional with default values based on the size of the data set such that the total pixels to be processed is approximately 10,000 (consider round up). The smaller these numbers, the larger the sample size used to generate the signatures for the classes defined.
iterations:
This parameter determines the maximum number of iterations which is
greater than the number of iterations predicted to achieve the optimum
percent convergence. The default value is 30. If the number of
iterations reaches the maximum designated by the user; the user may want
to rerun i.cluster with a higher number of iterations (see
reportfile).
Default: 30
convergence:
A high percent convergence is the point at which cluster means become
stable during the iteration process. The default value is 98.0 percent.
When clusters are being created, their means constantly change as pixels
are assigned to them and the means are recalculated to include the new
pixel. After all clusters have been created, i.cluster begins
iterations that change cluster means by maximizing the distances between
them. As these means shift, a higher and higher convergence is
approached. Because means will never become totally static, a percent
convergence and a maximum number of iterations are supplied to stop the
iterative process. The percent convergence should be reached before the
maximum number of iterations. If the maximum number of iterations is
reached, it is probable that the desired percent convergence was not
reached. The number of iterations is reported in the cluster statistics
in the report file (see reportfile).
Default: 98.0
separation:
This is the minimum separation below which clusters will be merged in
the iteration process. The default value is 0.0. This is an
image-specific number (a "magic" number) that depends on the image data
being classified and the number of final clusters that are acceptable.
Its determination requires experimentation. Note that as the minimum
class (or cluster) separation is increased, the maximum number of
iterations should also be increased to achieve this separation with a
high percentage of convergence (see convergence).
Default: 0.0
min_size:
This is the minimum number of pixels that will be used to define a
cluster, and is therefore the minimum number of pixels for which means
and covariance matrices will be calculated.
Default: 17
reportfile: The reportfile is an optional parameter which contains the result, i.e., the statistics for each cluster. Also included are the resulting percent convergence for the clusters, the number of iterations that was required to achieve the convergence, and the separability matrix.
NOTES
Sampling method
i.cluster does not cluster all pixels, but only a sample (see parameter sample). The result of that clustering is not that all pixels are assigned to a given cluster; essentially, only signatures which are representative of a given cluster are generated. When running i.cluster on the same data asking for the same number of classes, but with different sample sizes, likely slightly different signatures for each cluster are obtained at each run.
Algorithm used for i.cluster
The algorithm uses input parameters set by the user on the initial number of clusters, the minimum distance between clusters, and the correspondence between iterations which is desired, and minimum size for each cluster. It also asks if all pixels to be clustered, or every "x"th row and "y"th column (sampling), the correspondence between iterations desired, and the maximum number of iterations to be carried out.
In the 1st pass, initial cluster means for each band are defined by giving the first cluster a value equal to the band mean minus its standard deviation, and the last cluster a value equal to the band mean plus its standard deviation, with all other cluster means distributed equally spaced in between these. Each pixel is then assigned to the class which it is closest to, distance being measured as Euclidean distance. All clusters less than the user-specified minimum distance are then merged. If a cluster has less than the user-specified minimum number of pixels, all those pixels are again reassigned to the next nearest cluster. New cluster means are calculated for each band as the average of raster pixel values in that band for all pixels present in that cluster.
In the 2nd pass, pixels are then again reassigned to clusters based on new cluster means. The cluster means are then again recalculated. This process is repeated until the correspondence between iterations reaches a user-specified level, or till the maximum number of iterations specified is over, whichever comes first.
EXAMPLE
Preparing the statistics for unsupervised classification of a LANDSAT scene within North Carolina project:
# Set computational region to match the scene
g.region raster=lsat7_2002_10 -p
# store VIZ, NIR, MIR into group/subgroup (leaving out TIR)
i.group group=lsat7_2002 subgroup=res_30m \
input=lsat7_2002_10,lsat7_2002_20,lsat7_2002_30,lsat7_2002_40,lsat7_2002_50,lsat7_2002_70
# generate signature file and report
i.cluster group=lsat7_2002 subgroup=res_30m \
signaturefile=cluster_lsat2002 \
classes=10 reportfile=rep_clust_lsat2002.txt
To complete the unsupervised classification, i.maxlik is subsequently used. See example in its manual page.
The signature file obtained in the example above will allow to classify the current imagery group only (lsat7_2002). If the user would like to re-use the signature file for the classification of different imagery group(s), they can set semantic labels for each group member beforehand, i.e., before generating the signature files. Semantic labels are set by means of r.support as shown below:
# Define semantic labels for all LANDSAT bands
r.support map=lsat7_2002_10 semantic_label=TM7_1
r.support map=lsat7_2002_20 semantic_label=TM7_2
r.support map=lsat7_2002_30 semantic_label=TM7_3
r.support map=lsat7_2002_40 semantic_label=TM7_4
r.support map=lsat7_2002_50 semantic_label=TM7_5
r.support map=lsat7_2002_61 semantic_label=TM7_61
r.support map=lsat7_2002_62 semantic_label=TM7_62
r.support map=lsat7_2002_70 semantic_label=TM7_7
r.support map=lsat7_2002_80 semantic_label=TM7_8
SEE ALSO
- Image classification wiki page
- Historical reference also the GRASS GIS 4 Image Processing manual (PDF)
- Wikipedia article on k-means clustering (note that i.cluster uses a modification of the k-means clustering algorithm)
r.support, g.gui.iclass, i.group, i.gensig, i.maxlik, i.segment, i.smap, r.kappa
AUTHORS
Michael Shapiro, U.S. Army Construction Engineering Research
Laboratory
Tao Wen, University of Illinois at Urbana-Champaign, Illinois
Semantic label support: Maris Nartiss, University of Latvia
SOURCE CODE
Available at: i.cluster source code
(history)
Latest change: Thursday Nov 06 22:27:54 2025 in commit 298b386