r.hydro.flatten
Derive elevation of water bodies for hydro-flattening
r.hydro.flatten [-k] input=name [breaklines=name] water_elevation=name water_elevation_stddev=name [filled_elevation=name] percentile=float [max_stddev=float] [min_size=integer] [--overwrite] [--verbose] [--quiet] [--qq] [--ui]
Example:
r.hydro.flatten input=name water_elevation=name water_elevation_stddev=name percentile=5
grass.tools.Tools.r_hydro_flatten(input, breaklines=None, water_elevation, water_elevation_stddev, filled_elevation=None, percentile=5, max_stddev=None, min_size=None, flags=None, overwrite=None, verbose=None, quiet=None, superquiet=None)
Example:
tools = Tools()
tools.r_hydro_flatten(input="name", water_elevation="name", water_elevation_stddev="name", percentile=5)
This grass.tools API is experimental in version 8.5 and expected to be stable in version 8.6.
grass.script.run_command("r.hydro.flatten", input, breaklines=None, water_elevation, water_elevation_stddev, filled_elevation=None, percentile=5, max_stddev=None, min_size=None, flags=None, overwrite=None, verbose=None, quiet=None, superquiet=None)
Example:
gs.run_command("r.hydro.flatten", input="name", water_elevation="name", water_elevation_stddev="name", percentile=5)
Parameters
input=name [required]
Raster map of binned lidar point elevation
breaklines=name
Name of input vector map
Vector map of breaklines
water_elevation=name [required]
Raster map of derived water elevation
Represents single elevation value for each water body
water_elevation_stddev=name [required]
Raster map of derived water elevation standard deviation
filled_elevation=name
Raster map representing filled digital elevation model
percentile=float [required]
Percentile of elevation to determine water level
Default: 5
max_stddev=float
Maximum value of standard deviation to fill the DEM
min_size=integer
Minimum size of areas in map units
-k
Keep intermediate results
--overwrite
Allow output files to overwrite existing files
--help
Print usage summary
--verbose
Verbose module output
--quiet
Quiet module output
--qq
Very quiet module output
--ui
Force launching GUI dialog
input : str | np.ndarray, required
Raster map of binned lidar point elevation
Used as: input, raster, name
breaklines : str, optional
Name of input vector map
Vector map of breaklines
Used as: input, vector, name
water_elevation : str | type(np.ndarray) | type(np.array) | type(gs.array.array), required
Raster map of derived water elevation
Represents single elevation value for each water body
Used as: output, raster, name
water_elevation_stddev : str | type(np.ndarray) | type(np.array) | type(gs.array.array), required
Raster map of derived water elevation standard deviation
Used as: output, raster, name
filled_elevation : str | type(np.ndarray) | type(np.array) | type(gs.array.array), optional
Raster map representing filled digital elevation model
Used as: output, raster, name
percentile : float, required
Percentile of elevation to determine water level
Default: 5
max_stddev : float, optional
Maximum value of standard deviation to fill the DEM
min_size : int, optional
Minimum size of areas in map units
flags : str, optional
Allowed values: k
k
Keep intermediate results
overwrite : bool, optional
Allow output files to overwrite existing files
Default: None
verbose : bool, optional
Verbose module output
Default: None
quiet : bool, optional
Quiet module output
Default: None
superquiet : bool, optional
Very quiet module output
Default: None
Returns:
result : grass.tools.support.ToolResult | np.ndarray | tuple[np.ndarray] | None
If the tool produces text as standard output, a ToolResult object will be returned. Otherwise, None will be returned. If an array type (e.g., np.ndarray) is used for one of the raster outputs, the result will be an array and will have the shape corresponding to the computational region. If an array type is used for more than one raster output, the result will be a tuple of arrays.
Raises:
grass.tools.ToolError: When the tool ended with an error.
input : str, required
Raster map of binned lidar point elevation
Used as: input, raster, name
breaklines : str, optional
Name of input vector map
Vector map of breaklines
Used as: input, vector, name
water_elevation : str, required
Raster map of derived water elevation
Represents single elevation value for each water body
Used as: output, raster, name
water_elevation_stddev : str, required
Raster map of derived water elevation standard deviation
Used as: output, raster, name
filled_elevation : str, optional
Raster map representing filled digital elevation model
Used as: output, raster, name
percentile : float, required
Percentile of elevation to determine water level
Default: 5
max_stddev : float, optional
Maximum value of standard deviation to fill the DEM
min_size : int, optional
Minimum size of areas in map units
flags : str, optional
Allowed values: k
k
Keep intermediate results
overwrite : bool, optional
Allow output files to overwrite existing files
Default: None
verbose : bool, optional
Verbose module output
Default: None
quiet : bool, optional
Quiet module output
Default: None
superquiet : bool, optional
Very quiet module output
Default: None
DESCRIPTION
The tool derives single elevation value for water bodies based on lidar data. These values are used for hydro-flattening a digital elevation model. The input raster is expected to represent ground surface created by binning lidar data (e.g., using r.in.pdal) with averaged ground elevation. Small gaps in the input are expected. Large gaps are interpreted as water bodies. The minimum size of a water body can be set with min_size option in map units.
The output water_elevation is a raster map of water bodies where each water body has a single value representing the water level elevation derived from the lidar data at the edge of a water body. Since the elevation varies along the edge, option percentile is used to determine a single value. The variation along the edge can be examined with the water_elevation_stddev output representing the standard deviation of the lidar elevation values along the water body's edge. Higher deviation suggests problematic areas that need to be further inspected. The optional output filled_elevation is a raster map of the input ground surface filled with the computed water_elevation raster map.
The breaklines parameter is an optional input that specifies a vector map of lines that represent e.g., a break between an impoundment and downstream river, allowing correct elevation computation.
The max_stddev parameter filters areas that have higher standard deviation than provided limit, these areas are not included in the water_elevation and filled_elevation.
To keep the intermediate results for inspection, use flag -k.
NOTES
While this tool was designed for water bodies, it can be used for other purposes, e.g., for filling a gap in digital elevation models caused by excluding buildings.
This tool does not interpolate gaps in data, rather it derives a single value for each gap. The result can be used to fill gaps and the tool can be run on large areas. For actual gap interpolation, which is typically more computationally intensive, see r.fillnulls.
EXAMPLE
We will download a lidar tile with r.in.usgs addon, use r.in.pdal to bin the elevation points at 1 meter resolution, and derive elevation levels for lakes with minimum size of 4000 m^2.
# select study area and resolution
g.region n=213300 s=211900 w=653900 e=655300 res=1
# download lidar tile into /tmp
r.in.usgs product=lidar output_directory=/tmp title_filter=Phase2 -d
# bin point elevation using ground and road points with reprojection
r.in.pdal input=/tmp/USGS_LPC_NC_Phase2_2014_LA_37_20164902_.laz output=ground -w class_filter=2,13
# convert elevation from feet to meters
r.mapcalc "ground_m = ground * 0.304800609601219"
# derive elevation of water bodies and standard deviation
r.hydro.flatten input=ground_m water_elevation=water_elevation water_elevation_stddev=water_elevation_stddev filled_elevation=filled percentile=10 misize=4000
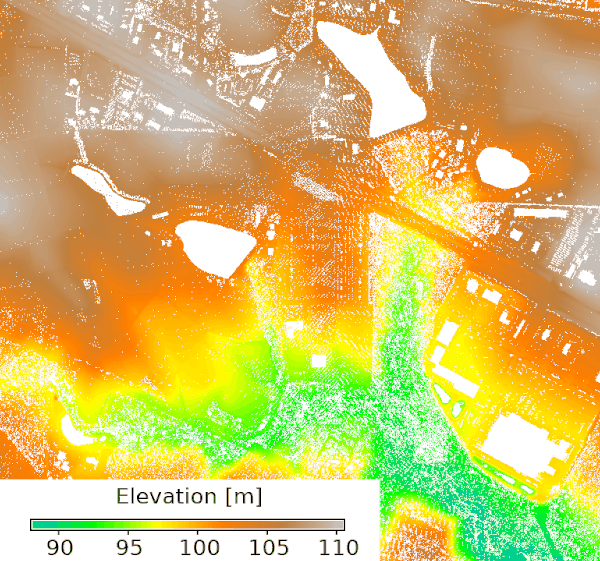
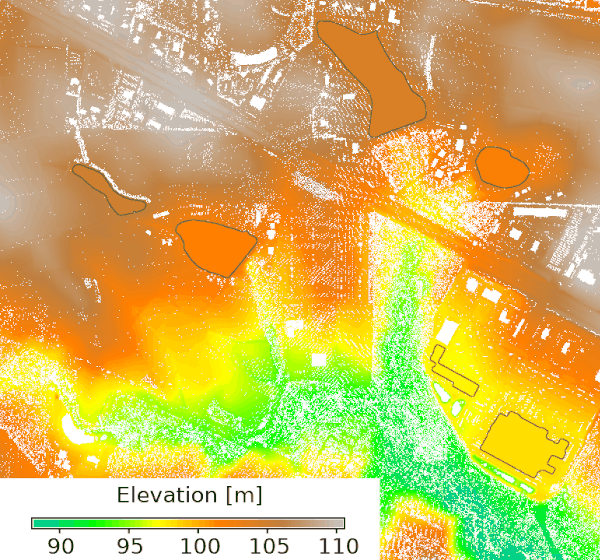
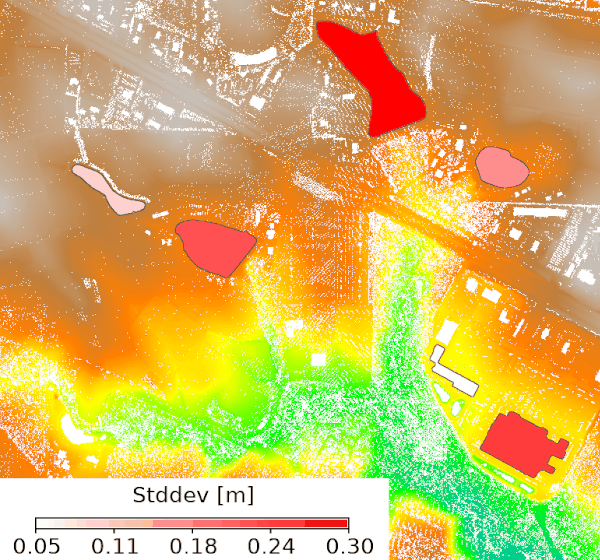
Figure: Input binned elevation representing ground with gaps (left),
input overlayed with elevation values estimated for gaps and highlighted
with an outline (middle), input overlayed with standard deviation of the
elevation along the edge of the gaps (right).
REFERENCE
Method based on workflow presented at NC GIS Conference 2021 by Doug Newcomb.
SEE ALSO
r.in.pdal, r.in.usgs, r.fillnulls
AUTHOR
Anna Petrasova, NCSU GeoForAll Lab
SOURCE CODE
Available at: r.hydro.flatten source code
(history)
Latest change: Wednesday Jun 17 14:05:16 2026 in commit 2b69c1e